Localization module 分析¶
作用:¶
实时确定车辆的位置。
Localization节点流图:¶
节点数据流图:¶
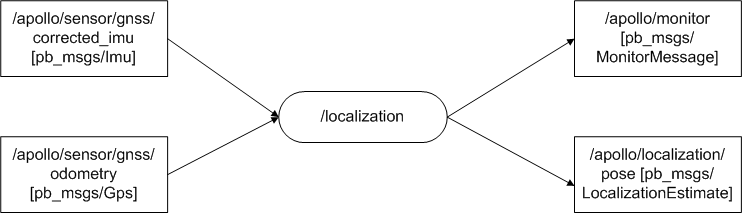
输入:¶
Imu数据:/apollo/sensor/gnss/corrected_imu。
Gps数据:/apollo/sensor/gnss/odometry。
输出:¶
定位信息:/apollo/localization/pose。
监视信息:/apollo/localization/。
代码分析:¶
主要文件:localization.cc,localization.h,localization_base.h。
Localization类:¶
继承于ApolloApp类,有三个数据,localization_具体的定位算法实例指针,localization_factory_存储定位算法类,config_存储配置文件信息。
Init()函数注册RTKLocalization类到localization_factory_,此类基于RTK算法实现定位算法;读取配置文件到config_。
Name()函数返回模块名字。
Start()函数,用localization_factory_类实例化一个定位算法对象,用localization_直向。若创建成功,调用定位算法的start()函数。
LocalizationBase类:¶
定位算法的基类。
Start()函数启动定位算法。
Stop()函数终止定位算法。
RTKLocalization类:¶
继承LocalizationBase类。
Start()函数:创建timer,检测gps和imu是否有数据。超时执行OnTimer()函数。OnTimer()函数检查gps和imu是否有数据,然后调用PublishLocalization()发布定位信息,并更新数据接收时间。在PublishLocalization()函数中先调用PrepareLocalizationMsg()函数计算定位信息,并填充发布数据结构localization;然后调用AdapterManager::PublishLocalization发布定位topic。PrepareLocalizationMsg(&localization)函数首先获取gps数据,然后根据gps数据时间戳获取imu数据,然后调用ComposeLocalizationMsg()函数,进行数据融合以定位,其实所谓的数据融合也就是在最终的定位信息中分别使用gps和imu测得数据设置定位信息,唯一由两个器件融合的量只有线速度。所谓RTK算法应该单指由gps数据获取gps定位信息,在localization阶段其实是使用这个定位信息,真正RTK算法应该是作用在gps数据的处理上。
Stop()函数停止timer,即退出定位模式。
疑惑:¶
定位信息给出的应该是车辆在世界中的的绝对位置,因为采用gps数据,那么这个位置如何与地图建立关系的?
答:地图中的点也可能是世界中的绝对位置。
map_offset这个量的作用://TODO