Apollo 2.5 快速入门指南¶
这个快速入门指南专注于Apollo 2.5新功能的介绍。对于Apollo的一般概念,请参考 Apollo 1.0 快速入门指南 和 Apollo软件安装指南。
上车测试¶
上车测试,请确认你已经调试了所有传感器之间的外部参数。关于传感器标定,请参考 Apollo 2.0 Sensor Calibration Guide.
启动发布的环境的Docker镜像
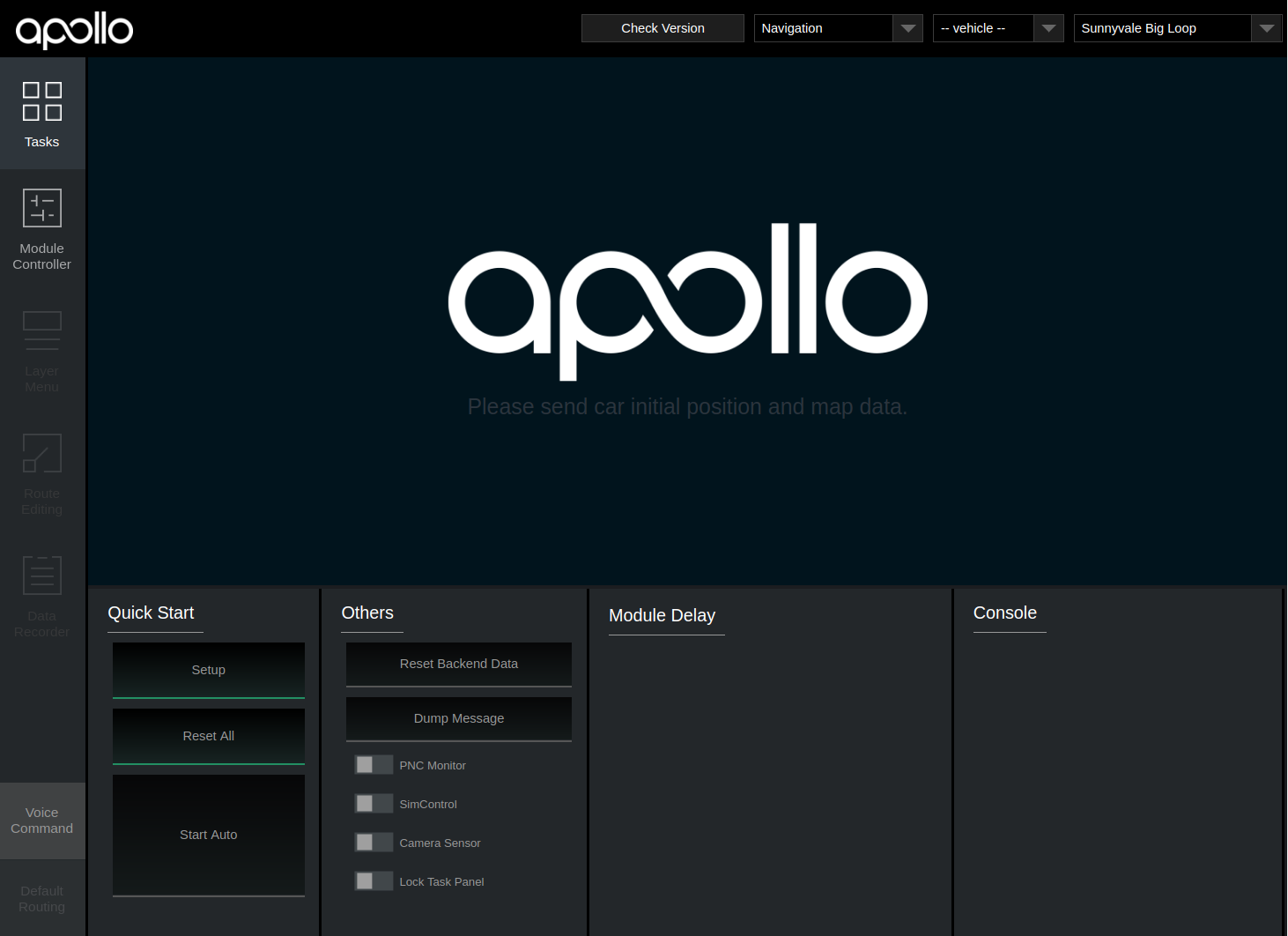
启动DreamView
打开浏览器(譬如Chrome)然后在地址栏输入http://localhost:8888来启动Apollo Dreamview。
选择模式、车辆和地图
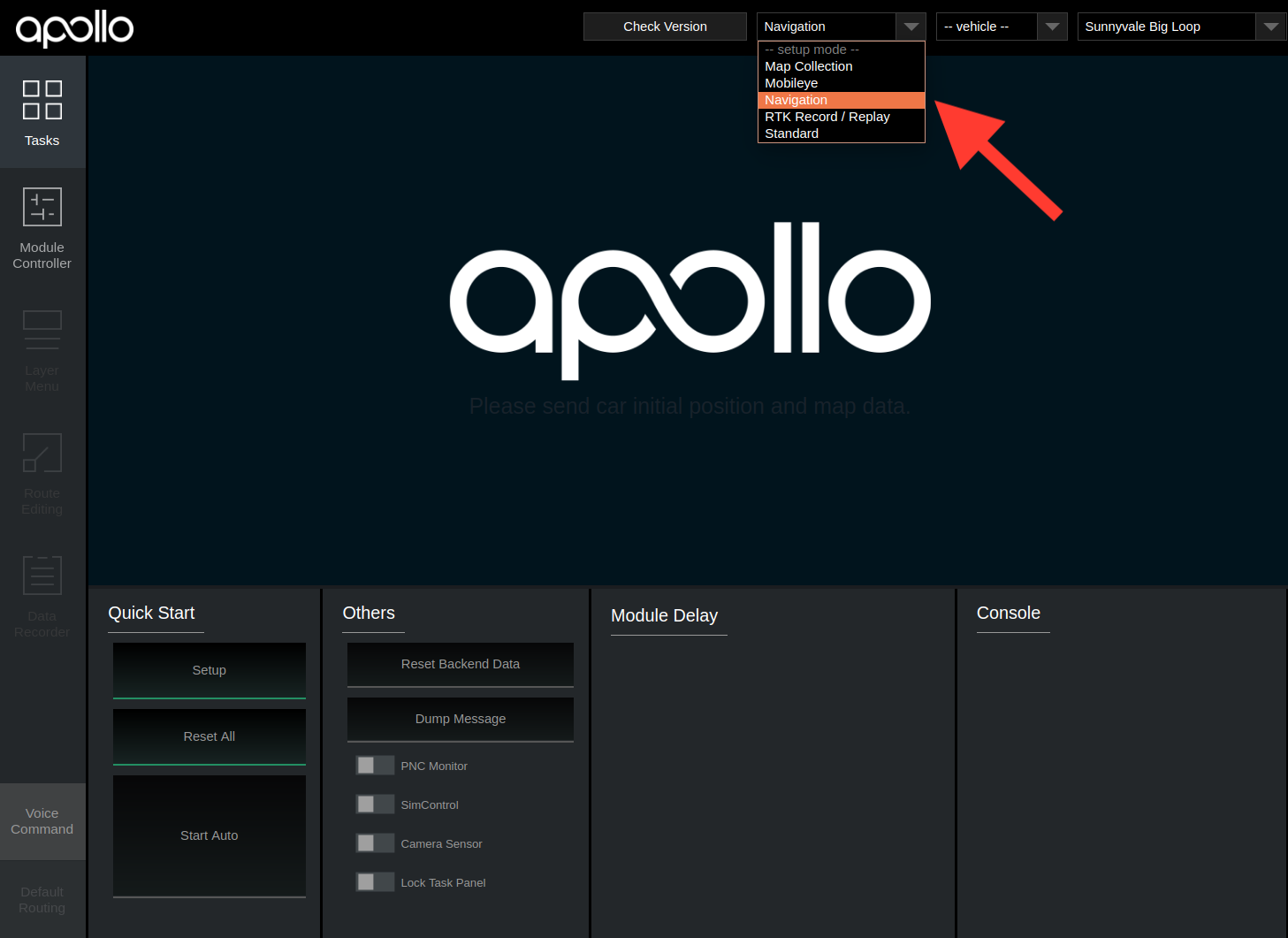
单击右上角下拉菜单选择车辆和地图。这个列表是在 HMI config file 中定义的。
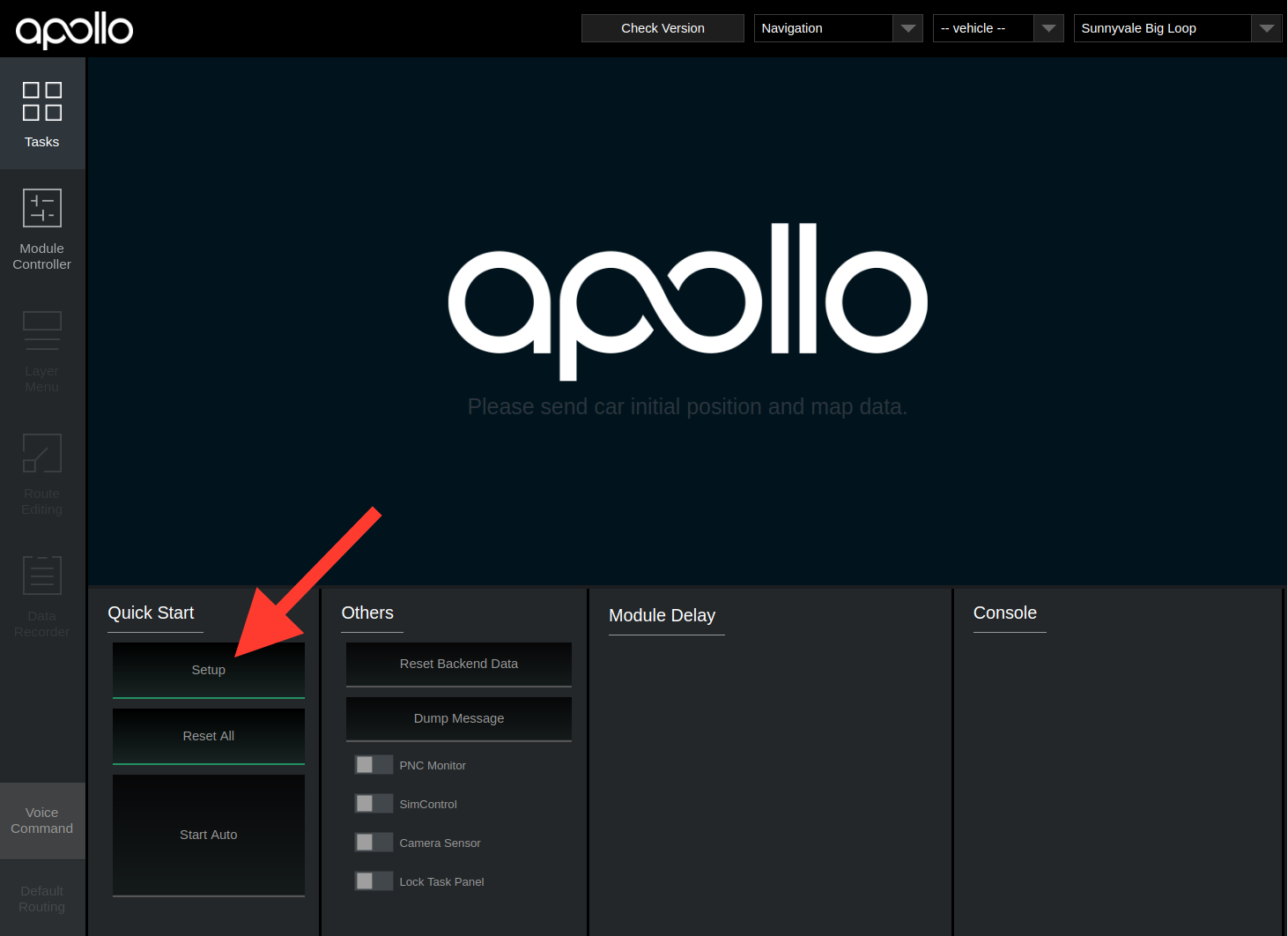
启动所有模块
点击左侧的”Setup”按钮来设置。
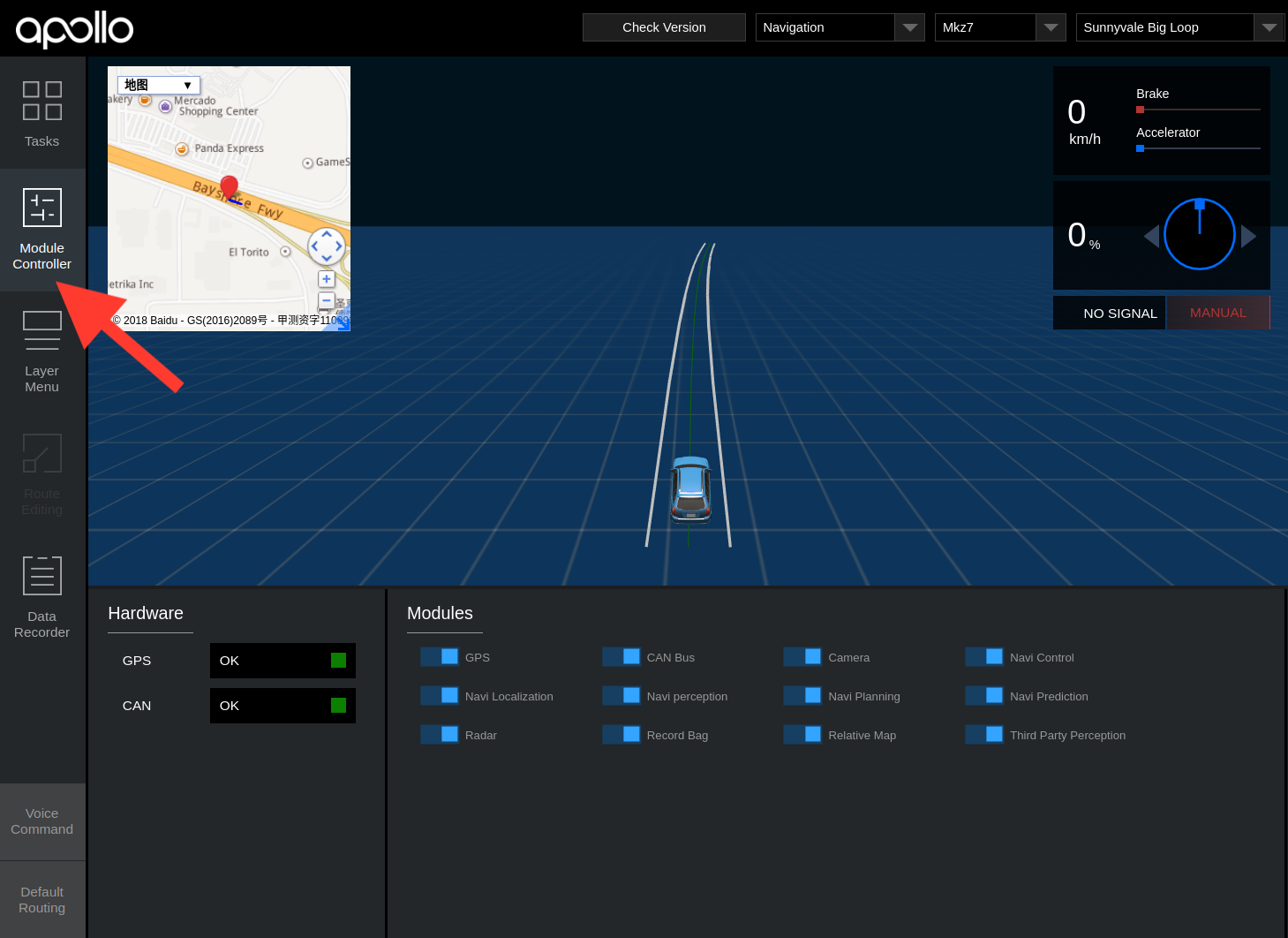
跳转到Module Controller页面,检查所有的软硬件都已正常工作。
在Default Routing下选择想要的路线。
在Tasks下谨慎启动自动驾驶模式
确定硬件已经齐备,所有模块已经打开并且汽车状态良好,环境安全,点击”Start Auto”按钮。
测试完成后,点击Reset All,关闭所有窗口,关闭工控机。