循迹搭建–定位模块配置¶
概览¶
该手册旨在帮助用户在自动驾驶开发套件上配置定位模块。在定位模块配置环节,将完成导航设备配置。
导航设备配置¶
下面介绍导航配置的方法。当设备正确接入系统后,在/dev/下面有名为ttyACM0的设备,即表示M2已经被正确地加载了。在配置导航设备之前,我们先给导航设备添加一个规则文件。在终端中输入以下命令来查看设备的端口号:
ls -l /sys/class/tty/ttyACM0
记下形如1-10:1.0的一串数字;在系统/etc/udev/rules.d/目录下执行sudo touch 99-kernel-rename-imu.rules命令新建一个文件99-kernel-rename-imu.rules,执行sudo vim 99-kernel-rename-imu.rules命令添加文件内容:ACTION=="add",SUBSYSTEM=="tty",MODE=="0777",KERNELS=="1-10:1.0",SYMLINK+="imu"
其中的1-10:1.0就是上面记下的一串数字,根据实际情况进行替换即可;然后先按ESC键然后再按:wq保存文件内容退出,并重启系统。重启系统后执行cd /dev命令,用ls -l imu命令查看设备,要确保imu存在。配置设备时,需要将设备的串口线连接上电脑的串口才可以对设备进行配置,也就是说,用来配置设备的电脑主机需要拥有串口。Windows下可以通过串口助手、串口猎人或者COMCenter等工具进行配置,Linux下可以通过Minicom、cutecom等工具进行配置。linux下建议使用cutecom软件,可使用sudo apt install cutecom来安装此软件,在终端中使用sudo cutecom命令打开该软件,在软件中open名为ttyS0的设备。
杆臂配置¶
车尾天线(后天线,通常是主天线,也就是Primary)杆臂配置:
$cmd,set,leverarm,gnss,x_offset,y_offset,z_offset*ff
这里的杆臂值x_offset,y_offset,z_offset就是车辆集成环节中测量所得的杆臂值,杆臂值请以自己使用的实际情况为准。
导航模式配置¶
$cmd,set,navmode,FineAlign,off*ff
$cmd,set,navmode,coarsealign,off*ff
$cmd,set,navmode,dynamicalign,on*ff
$cmd,set,navmode,gnss,double*ff
$cmd,set,navmode,carmode,on*ff
$cmd,set,navmode,zupt,on*ff
$cmd,set,navmode,firmwareindex,0*ff
USB接口输出设置¶
$cmd,output,usb0,rawimub,0.010*ff
$cmd,output,usb0,inspvab,0.010*ff
$cmd,through,usb0,bestposb,1.000*ff
$cmd,through,usb0,rangeb,1.000*ff
$cmd,through,usb0,gpsephemb,1.000*ff
$cmd,through,usb0,gloephemerisb,1.000*ff
$cmd,through,usb0,bdsephemerisb,1.000*ff
$cmd,through,usb0,headingb,1.000*ff
网口配置¶
$cmd,set,localip,192,168,0,123*ff
$cmd,set,localmask,255,255,255,0*ff
$cmd,set,localgate,192,168,0,1*ff
$cmd,set,netipport,111,112,113,114,8000*ff
$cmd,set,netuser,username:password*ff
$cmd,set,mountpoint,XMJL*ff
假如您通过自建RTK基站或者购买RTK基站服务的方式拥有了一个RTK基站账号,账号信息如下:
ip:203.107.45.154
port:8002
mount_point:RTCM32_GGB
user:qianxun1234
password:abc123
这里我们假设您所使用的无线路由器的IP地址为192.168.0.1,那么我们将M2主机的IP地址设置为192.168.0.123,子网掩码为255.255.255.0,网关为192.168.0.1。netipport设置的是RTK基站的IP地址和端口号,具体到上面您购买的RTK基站账号中,在此处IP地址为:203.107.45.154,端口号为:8002;netuser设置的是RTK基站的用户名和密码,在此处用户名为:qianxun1234,密码为:abc123;在实际配置中,请以自己实际购买的基站账号的用户名和密码为准。mountpoint是RTK基站的挂载点,在这里我们选用RTCM32_GGB。注意:在M2的网络模块配置完成后,在IPC主机中应该是可以ping通IMU的ip地址的;否则,IMU无法正常联网,在后续的GNSS信号检查中会一直显示SINGLE而不是我们期望的NARROW_INT。
注意:当您升级了IMU的固件版本时,请用以下命令来查看IMU的网络相关的配置:
$cmd,get,netpara*ff
若输出的内容有$cmd,set,ntrip,disable,disable*ff相关的字样,则将以下命令输入IMU:
$cmd,set,ntrip,enable,enable*ff
$cmd,save,config*ff
PPS授时接口输出¶
ppscontrol enable positive 1.0 10000
log com3 gprmc ontime 1 0.25
将所有配置逐条发送给设备,得到设备返回$cmd,config,ok*ff字段,说明配置成功,配置成功后要进行配置保存,发送$cmd,save,config*ff指令;也可以将以上的相关配置命令保存在/apollo/docs/D-kit/sample/imu.conf文件中,然后在cutecom中点击右边的Send file...按钮,在弹出的对话框中选择imu.conf文件后点击Open按钮后即可将文件中保存的配置命令全部发送给设备,一切正常的情况下,设备会返回25个$cmd,config,ok*ff字段,说明配置成功;切记在发送文件之前将自己的实际信息保存在文件中,比如杆臂值和GNSS的账号信息等。配置成功后将该设备断电后重新上电加载后即可使用。注意:PPS授时接口输出的两条配置命令是没有返回$cmd,config,ok*ff字段的,这是正常情况,不用担心。
系统文件配置¶
系统文件配置主要包括两部分,GNSS配置、localization.conf文件配置。
GNSS配置¶
将文档modules/calibration/data/dev_kit/gnss_conf/gnss_conf.pb.txt中的proj4_text: "+proj=utm +zone=50 +ellps=WGS84 +towgs84=0,0,0,0,0,0,0 +units=m +no_defs"这一行中的zone=50中的50换成自己的城市所在的utmzone数值;比如这里的数值50代表的是北京,若您在纽约,则用纽约的utmzone数值10替换掉这里的数值50,以此类推。
Localization.conf文件的配置¶
对modules/calibration/data/dev_kit/localization_conf/localization.conf文件进行配置。如果该配置文件没有进行正确配置,可能会对之后的传感器标定、虚拟车道线制作等功能产生影响
参数 |
说明 |
|---|---|
lidar_height_default |
参数值修改为lidar中心到地面的距离 单位m |
local_utm_zone_id |
需要用户查询所在地区的utm_zone,并进行修改。例如,北京地区utm_zone为50。utm_zone的查询可参考该网页 |
imu_to_ant_offset_x |
x轴方向杆臂值,单位m,杆臂值测量方法参看 |
imu_to_ant_offset_y |
y轴方向杆臂值,单位m,杆臂值测量方法参看 |
imu_to_ant_offset_z |
z轴方向杆臂值,单位m,杆臂值测量方法参看 |
–enable_lidar_localization=true |
修改为 |
检查定位模块能否正常启动¶
将车辆移至室外平坦开阔处,按顺序执行如下操作
1. 编译项目,启动Dreamview¶
进入docker环境,用gpu编译项目,启动DreamView
cd /apollo
bash docker/scripts/dev_start.sh
bash docker/scripts/dev_into.sh
bash apollo.sh build_opt
bash scripts/bootstrap.sh
2. 启动定位模块¶
在浏览器中打开
(http://localhost:8888),选择模式为Dev Kit Debug, 选择车型为Dev Kit,在Module Controller标签页启动GPS、Localization模块。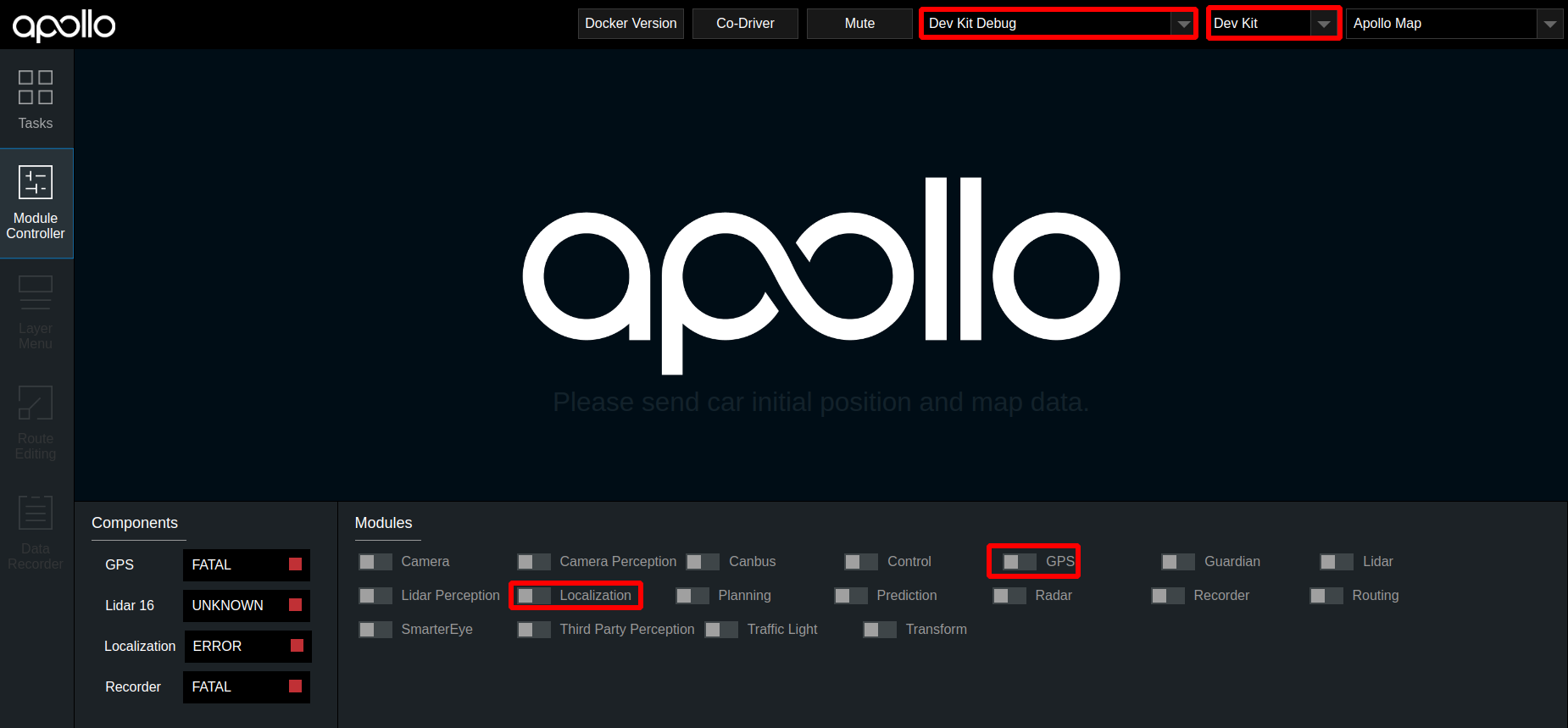
3. 检查GPS信号¶
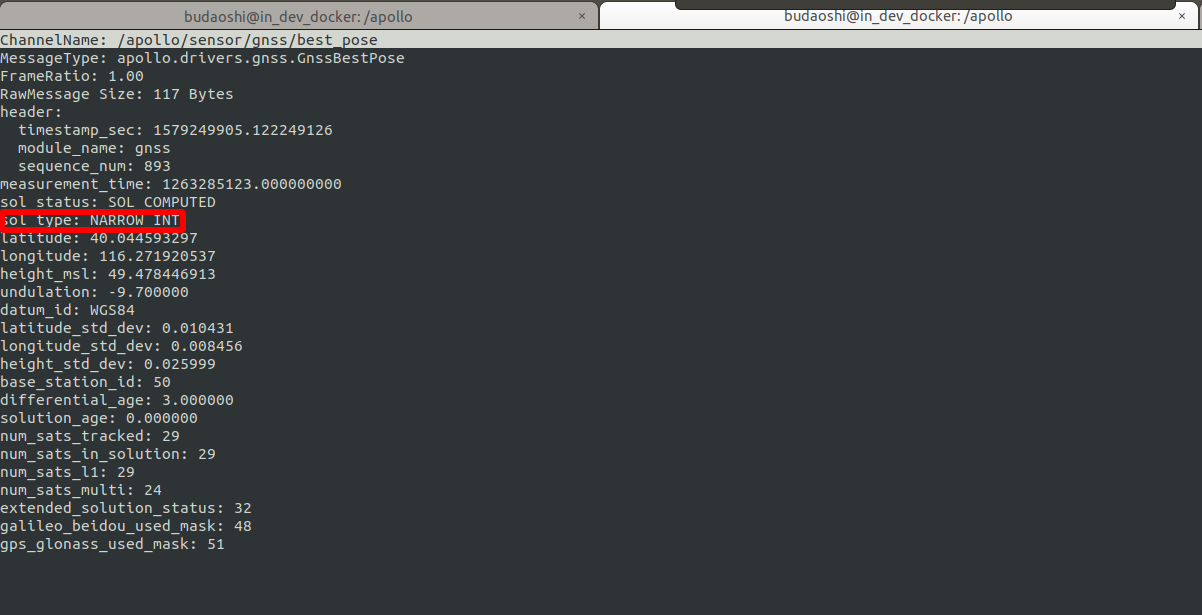
打开新的终端,并使用bash docker/scripts/dev_into.sh命令进入docker环境,在新终端中输入cyber_monitor命令,进入 /apollo/sensor/gnss/best_pose条目下,查看sol_type字段是否为NARROW_INT。若为NARROW_INT,则表示GPS信号良好;若不为NARROW_INT,则将车辆移动一下,直到出现NARROW_INT为止。进入/apollo/sensor/gnss/imu条目下,确认IMU有数据刷新即表明GPS模块配置成功。
NEXT¶
现在,您已经完成定位模块配置,接下来可以开始循迹搭建–车辆动力学云标定
常见问题¶
a.系统无法生成驱动设备ttyACM0,在/apollo/data/log/gnss.INFO里面会有类似报错提示:
open device /dev/ttyACM0 failed, error: no such file or directory
gnss driver connect failed, stream init failed
docker内和docker外的/dev/下都没有ttyACM0设备,先退出docker,然后关闭docker,再执行如下命令:
cd /apollo/docker/setup_host
bash setup_host.sh
重启工控机,然后在/docker/外,/dev/下,就有ttyACM0,再进docker,再试gps,可以了。
b.GPS打开后,发现best_pose, imu, localization/pose 信号没有收到
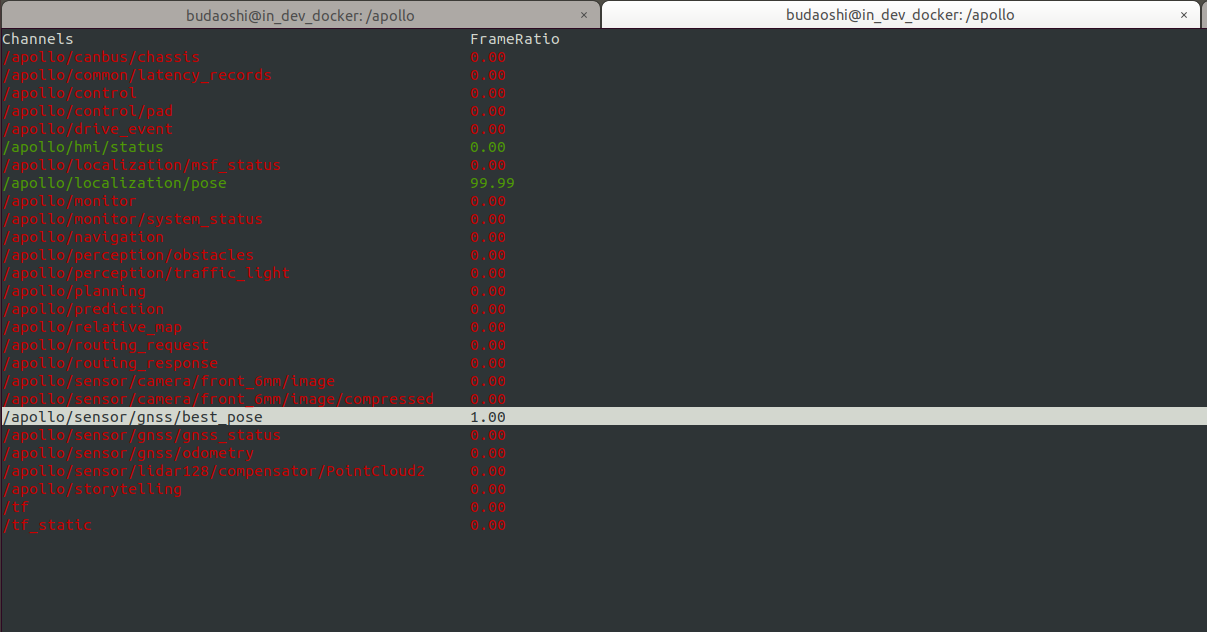
运行bash gps.sh后,可以cyber_monitor中观察以下几个信号。(关于cyber_monitor更详细使用,请参考CyberRT_Developer_Tools)
/apollo/sensor/gnss/best_pose
/apollo/sensor/gnss/imu
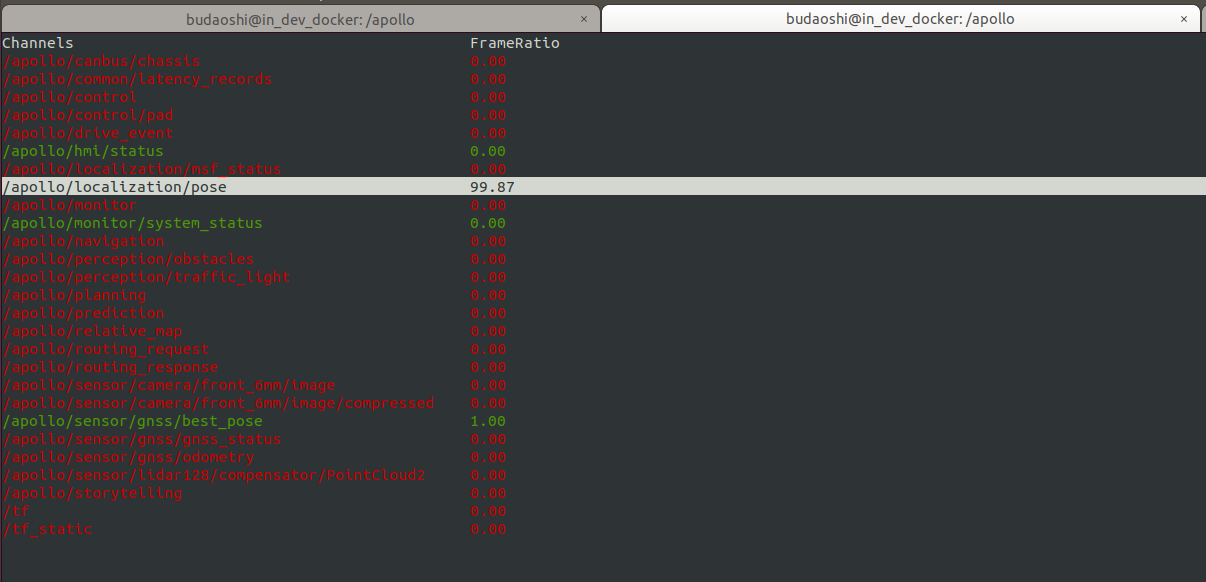
/apollo/localization/pose
如果best_pose和imu没有,请检查gps和imu的配置。 如果best_pose和imu有了,但是localization/pose没有信号,请等待2分钟,如果还是没有,请让车开动几分钟。
c.GPS打开后,发现best_pose的sol_type为single,不是我们需要的NARROW_INT。
首先,确认IMU设备中已经配置好了基站信息。
其次,检查IMU的网络接口是否插好了网线连接上了路由器,并且可以在工控机的终端里ping通IMU,同时保证路由器里面插上了手机的sim卡并且工控机能通过路由器正常地访问互联网。
再次,联系商务的同事请他们提供刷新IMU的固件版本的教程和工具,刷新完IMU后请按照文档重新配置一遍IMU。
最后,联系商务的同事商讨将IMU返厂维修的事宜。