基于双目感知的封闭园区自动驾驶搭建–自动驾驶演示¶
前提条件¶
正确完成了封闭园区自动驾驶搭建–规划适配。
正确完成了基于双目感知的封闭园区自动驾驶搭建–设备集成。
确保在道路平整、车少人少等相对安全的情况下实验。
确保至少两人操作,一人操作工控机,一人操作遥控器,做好随时接管准备。
启动流程¶
进入docker环境,编译apollo,启动DreamView。
cd /apollo bash docker/scripts/dev_start.sh bash docker/scripts/dev_into.sh bash apollo.sh build_opt bash scripts/bootstrap.sh
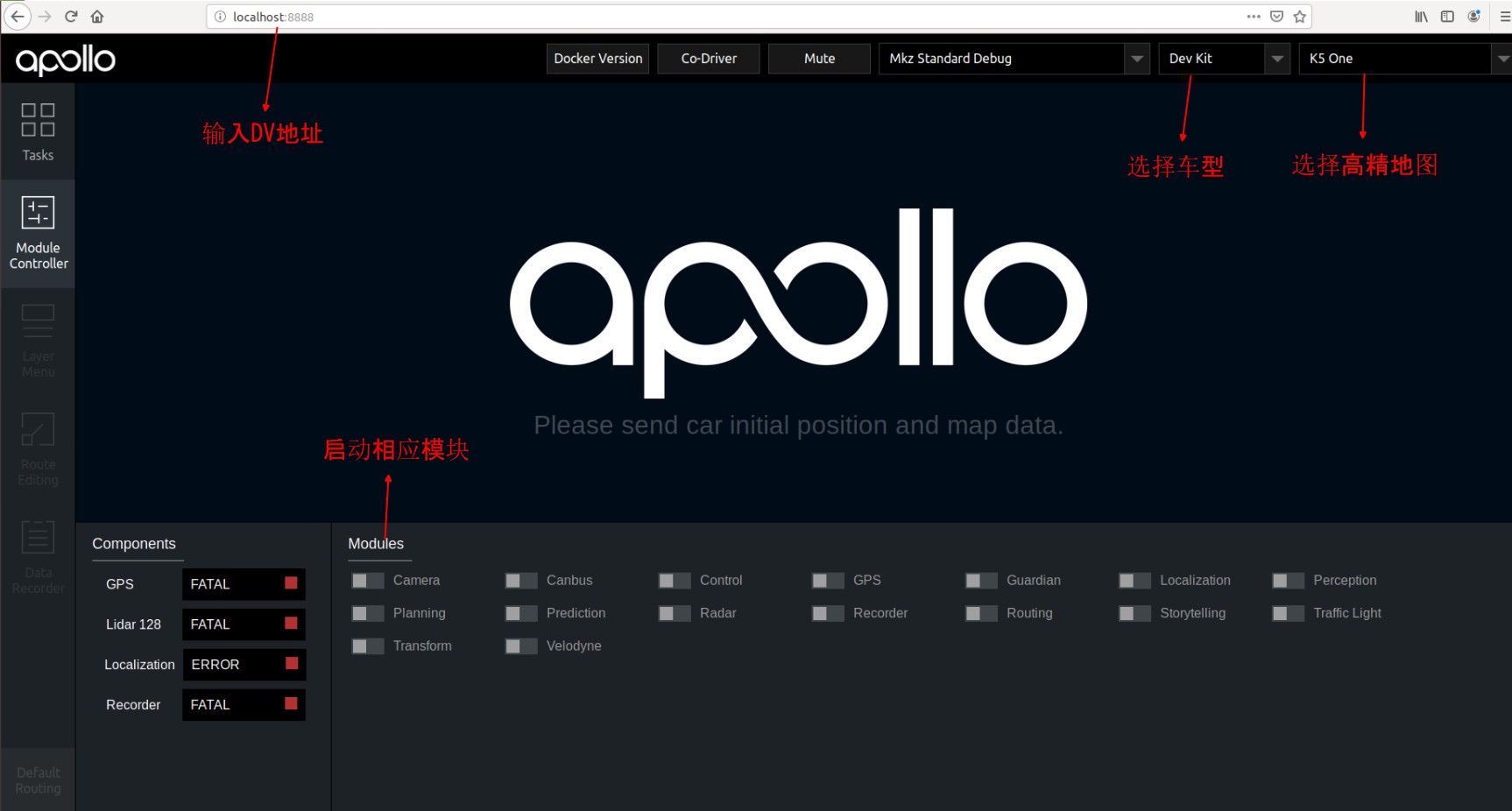
在浏览器中打开(http://localhost:8888),选择
Dev_Kit并选择相应高精地图,在Module Controller标签页启动Canbus、GPS、Localization、Camera、Transform模块。
在docker中输入
cyber_monitor命令并检查以下channel(使用上下方向键选择channel,使用右方向键查看channel详细信息。关于cyber_monitor更详细使用,请参考CyberRT_Developer_Tools):channel_name
检查项目
/apollo/localization/pose确保能正常输出数据
/apollo/sensor/gnss/best_pose确保能正常输出数据,
sol_type:选项显示为NARROW_INT/apollo/sensor/smartereye/image确保能正常输出数据,帧率在15帧左右
/tf确保能正常输出数据
/tf_static确保能正常输出数据
在
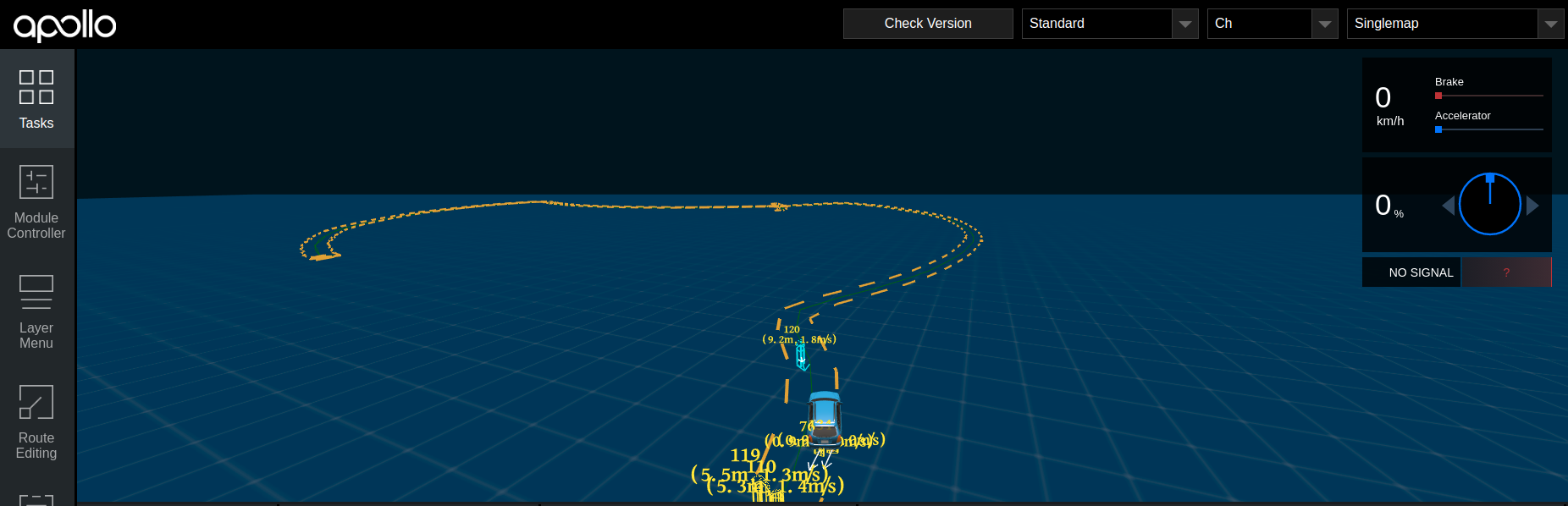
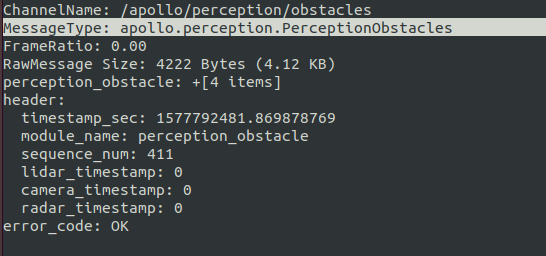
DreamView的Module Controller界面点击ThirdPartyPerception按钮启动双目相机感知,使用cyber_monitor查看/apollo/perception/obstacles是否正常输出,并在DreamView上查看障碍物信息:查看车前方10米处运动的人或者自行车(自行车上要有人),在DreamView上查看障碍物颜色以及位置速度信息(自行车青蓝色,行人黄色,车辆绿色),如下图所示:
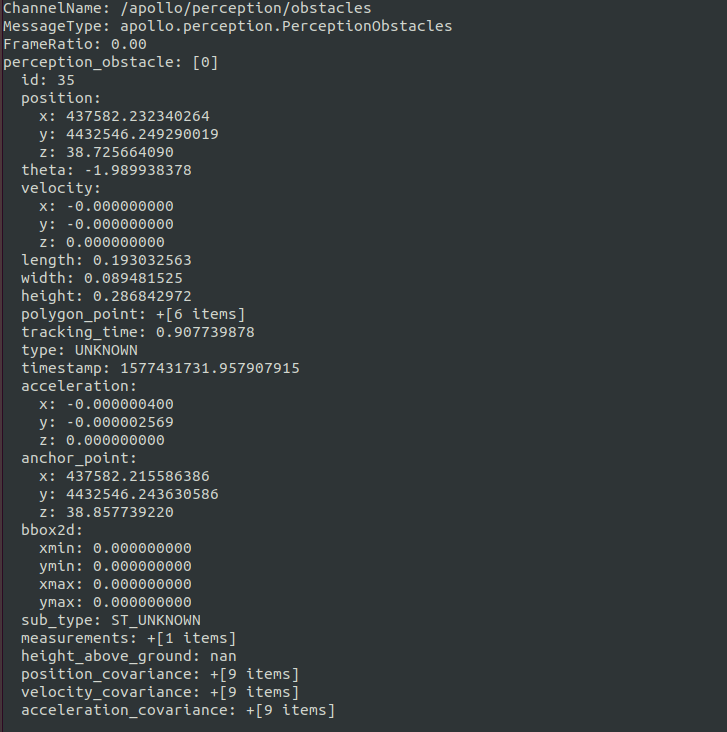
/apollo/perception/smartereyeobstacles的数据如下图所示:
确保在Dreamview上能看到障碍物并且/apollo/perception/obstacles有障碍物信息。
在Module Controller标签页启动Planning、Prediction、Routing、Control模块确保这些模块能够正常启动。
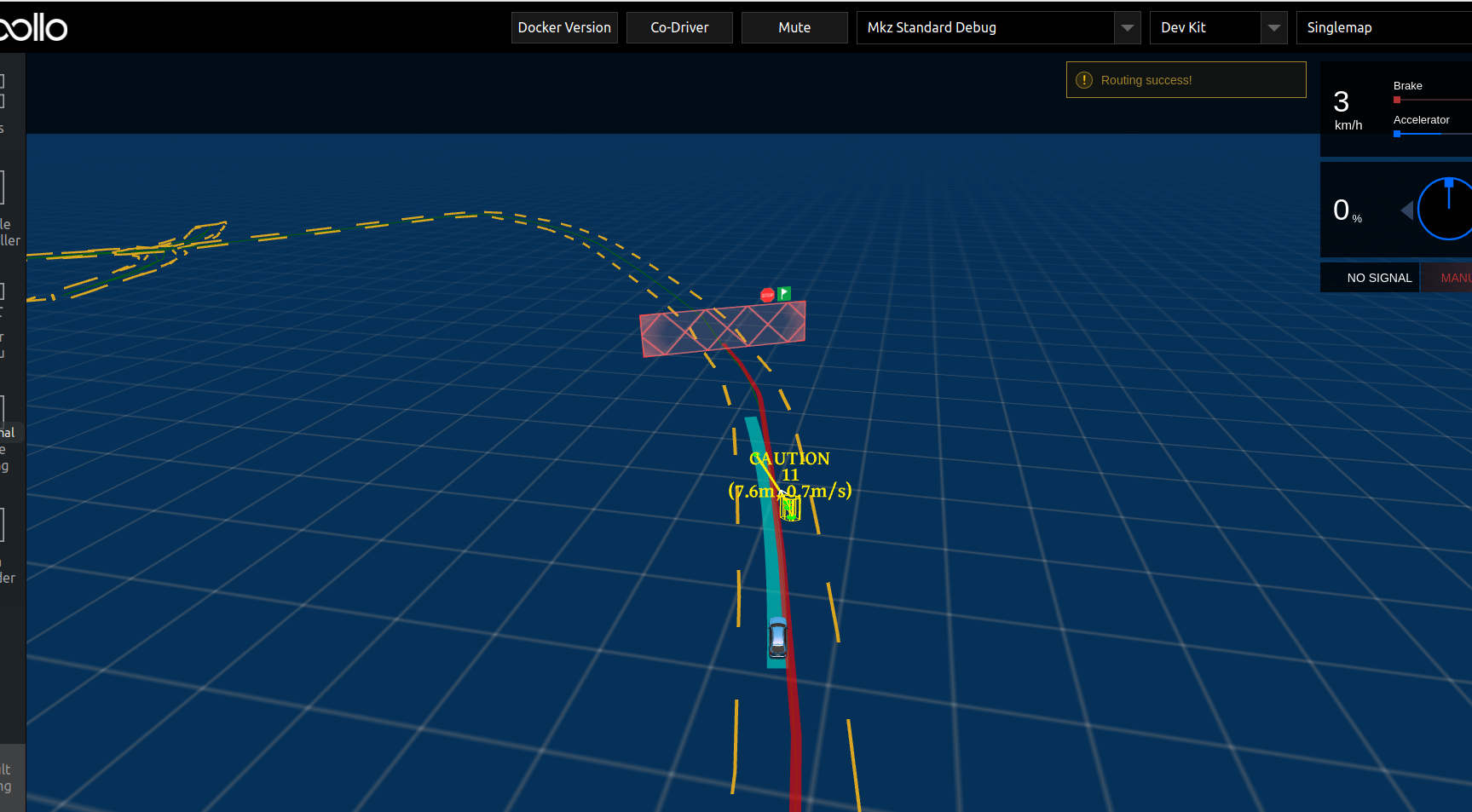
在Routing Editor标签中点击Add Point of Interest按钮添加一个point 然后选择Send Routing Request按钮发送添加的routing点,从DreamView中查看会出现一个蓝色的线以及一个红色的stop标志。如下图所示:
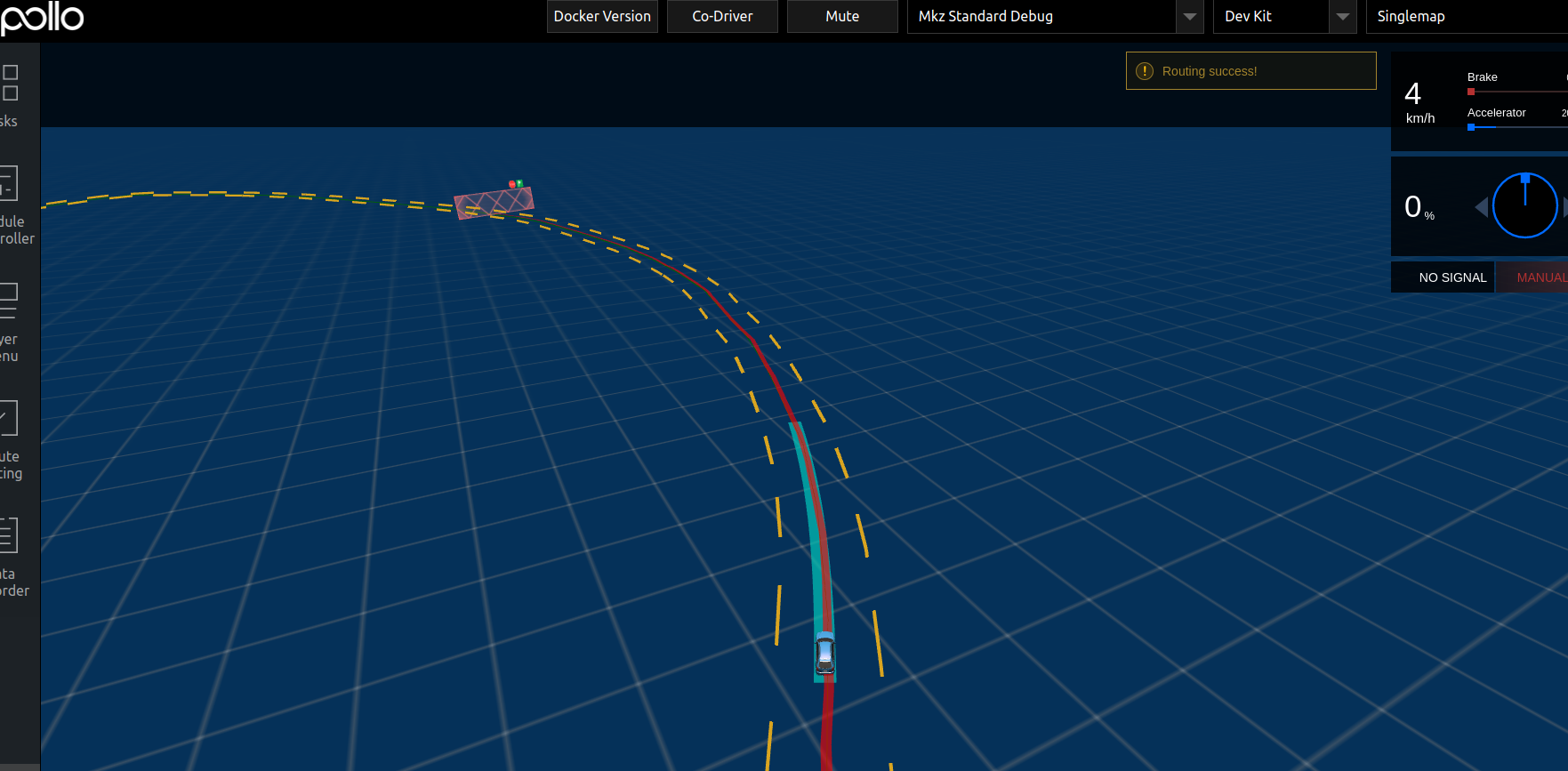
在车前方存在人或者自行车(车上有人)时,在Tasks标签页查看Planning轨迹线,如下图所示:
在docker环境中输入命令cyber_monitor并查看Planning channel信息:
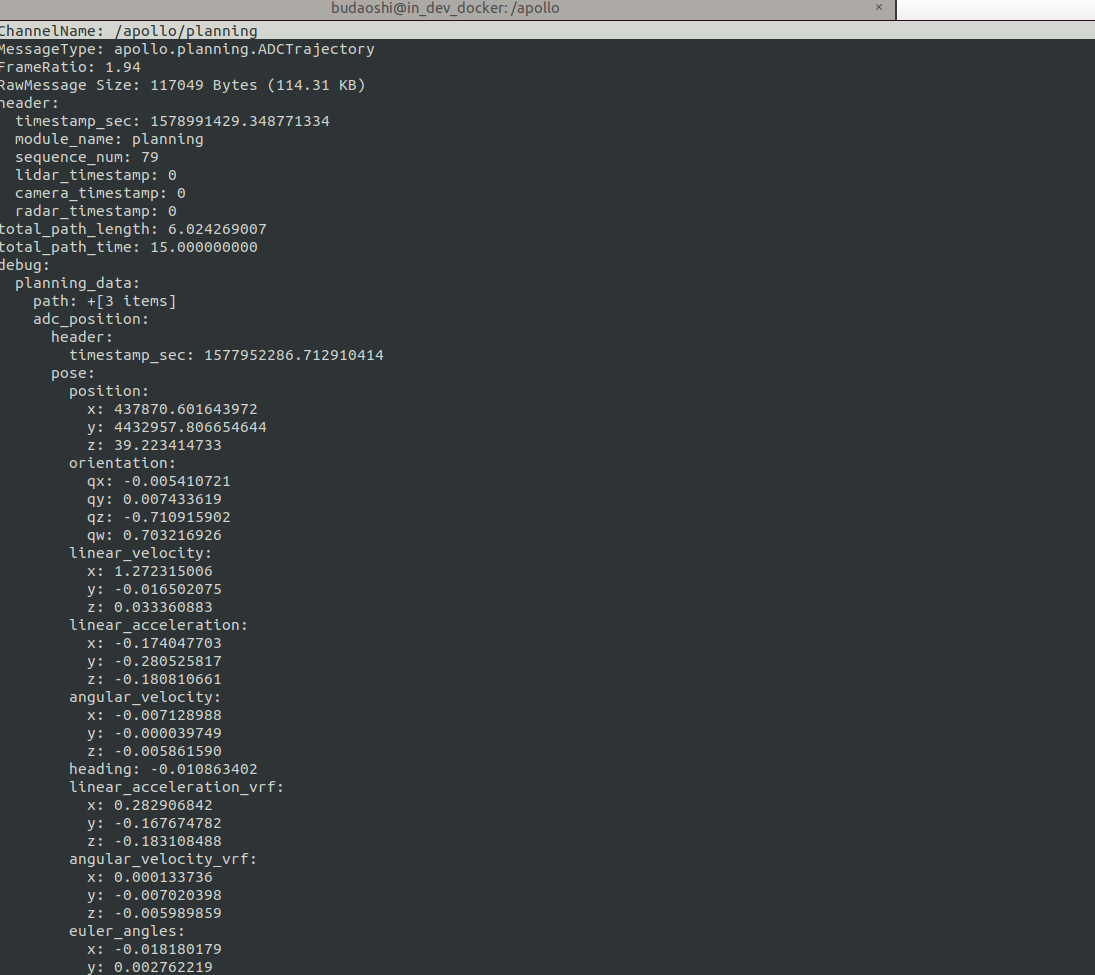
如果出现上图所示轨迹线和channel信息,表示规划模块适配和开环测试通过,否则继续查看log信息进行调试。
在附近没有人员和车的情况下,遥控器下放权限并在Tasks标签页中点击Start Auto使车进入自动驾驶状态,在车自动驾驶这个过程中做好随时用遥控器接管,确保安全的准备。
注意:如果Planning启动不起来的话,可通过摆正车的朝向以及在地图中的位置多试验几次。