Guideline of sensor Installation for Apollo 2.5¶
April 19, 2018
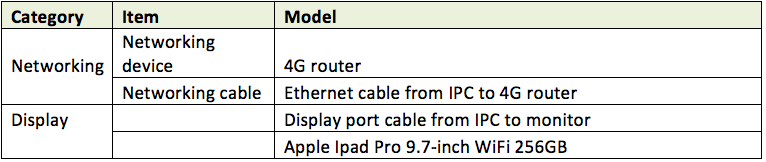
Coordinate system¶
Unit: millimeter (mm)
Origin: The center of the rear wheel Axle
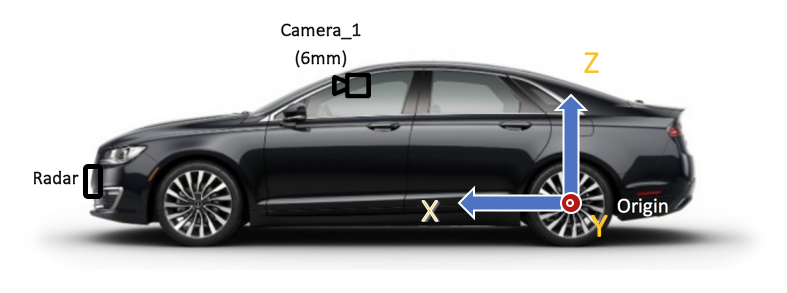
Figure 1. The origin and the coordinate of the system

Figure 2. Coordinates and Installation of cameras and a radar for truck
Sensor installation Guideline¶
IMU/GPS¶
IMU/GPS need to be installed near the rear wheel axle. GPS antenna needs to install at the top of the vehicle.
Radar¶
The long-range Radar needs to be installed at the front bumper of the vehicle as shown in Figure 1 and Figure 2.
Camera¶
One camera with 6mm-lens should face the front of ego-vehicle. The front-facing camera needs to be installed at the center of the front of a vehicle the height between 1,600mm and 2,000mm from the ground (Camera_1) or at the windshield of a vehicle (Camera_2).
Figure 3. Example setup of cameras
After installation of cameras, The physical x, y, z location of camera w.r.t. origin should be saved in the calibration file.
Verification of camera Setups¶
The orientation of all three cameras should be all zeros. When the camera is installed, it is required to record a rosbag by driving a straight highway. By the replay of rosbag, the camera orientation should be re-adjusted to have pitch, yaw, and roll angles to be zero degree. When the camera is correctly installed, the horizon should be at the half of image width and not tilted. The vanishing point should be also at the center of the image. Please see the image below for the ideal camera setup.

Figure 4. An example of an image after camera installation. The horizon should be at the half of image height and not tilted. The vanishing point should be also at the center of the image. The red lines show the center of the width and the height of the image.
The example of estimated translation parameters is shown below.
header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: white_mkz
child_frame_id: onsemi_obstacle
transform:
rotation:
x: 0.5
y: -0.5
z: 0.5
w: -0.5
translation:
x: 1.895
y: -0.235
z: 1.256
If angles are not zero, they need to be calibrated and represented in quaternion (see above stransformation->rotation).