如何添加新的camera匹配算法¶
Perception中的camera数据流如下:
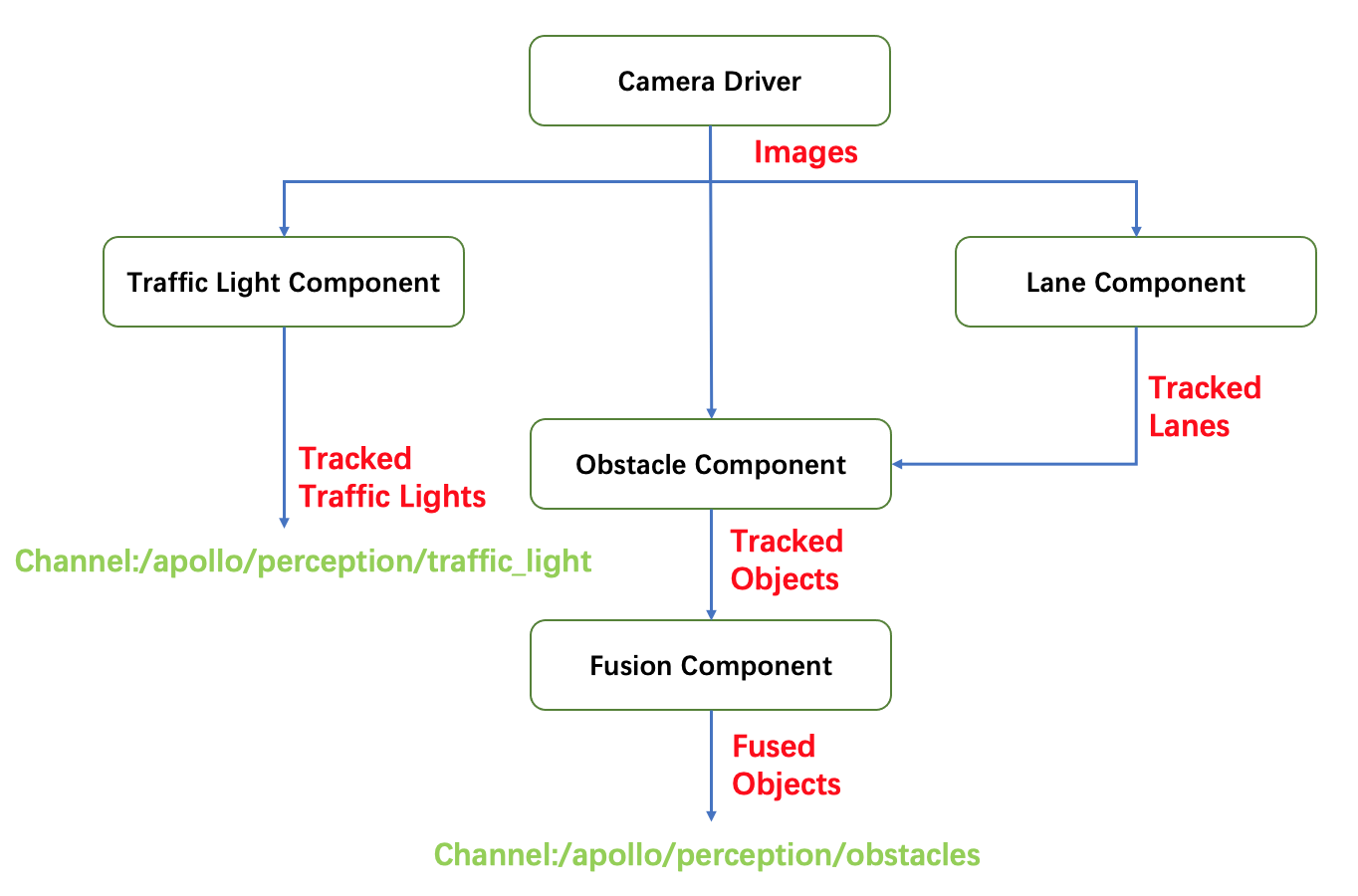
本篇文档所介绍的camera匹配算法分为两种,分别为针对交通信号灯的匹配算法和针对障碍物的匹配算法(针对车道线的匹配算法虽然已预留接口类,但目前暂未部署)。这两种匹配算法分别位于图中的Traffic_light和Obstacle三两大Component中。各Component的架构如下:
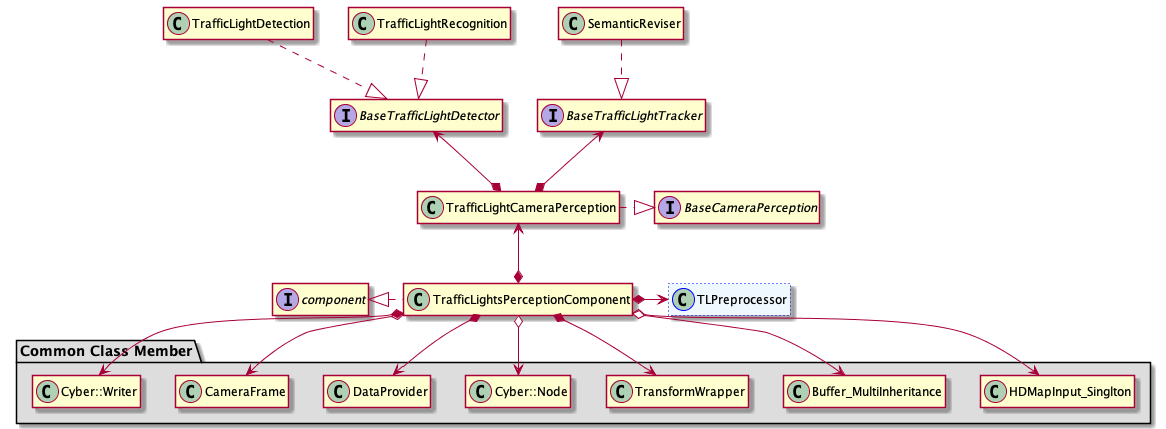
交通信号灯感知:
障碍物感知:
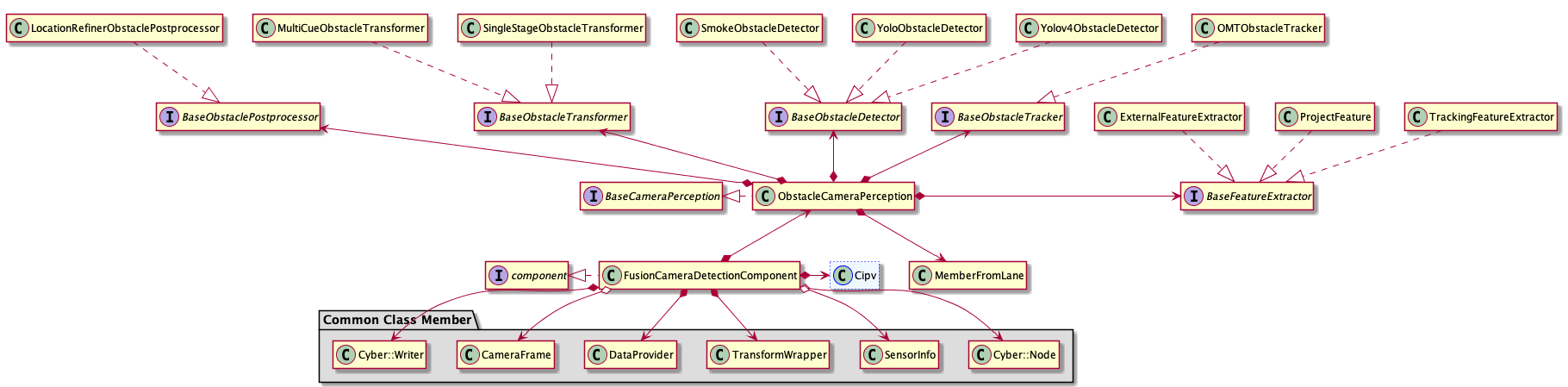
从以上结构中可以清楚地看到,各个component都有自己的抽象类成员 base_XXX_tracker。对应的匹配算法作为 base_XXX_tracker 的不同的派生类,继承各自的基类实现算法的部署。由于各tracker基类在结构上非常相似,下面将以 base_obstacle_tracker 为例介绍如何基于当前结构添加新的camera障碍物匹配算法。新增交通信号灯匹配算法的步骤相同。
Apollo在Obstacle Detection中默认提供了1种camera匹配算法–OMTObstacleTracker,它们可以被轻松更改或替换为不同的算法。算法的输入都是经过检测算法识别的目标级障碍物信息,输出都是经过匹配跟踪算法筛选后的目标级障碍物信息。本篇文档将介绍如何引入新的Camera匹配算法,添加新算法的步骤如下:
定义一个继承基类
base_obstacle_tracker的类实现新类
NewObstacleTracker为新类
NewObstacleTracker配置param的proto文件更新config文件使新的算法生效
为了更好的理解,下面对每个步骤进行详细的阐述:
定义一个继承基类 base_obstacle_tracker 的类¶
所有的camera匹配算法都必须继承基类base_obstacle_tracker,它定义了一组接口。 以下是匹配算法继承基类的示例:
namespace apollo {
namespace perception {
namespace camera {
class NewObstacleTracker : public BaseObstacleTracker {
public:
NewObstacleTracker();
virtual ~NewObstacleTracker() = default;
bool Init(const ObstacleTrackerInitOptions& options) override;
bool Predict(const ObstacleTrackerOptions &options,
CameraFrame *frame) override;
bool Associate2D(const ObstacleTrackerOptions &options,
CameraFrame *frame) override;
bool Associate3D(const ObstacleTrackerOptions &options,
CameraFrame *frame) override;
bool Track(const ObstacleTrackerOptions& options,
CameraFrame* frame) override;
std::string Name() const override;
}; // class NewObstacleTracker
} // namespace camera
} // namespace perception
} // namespace apollo
基类 base_obstacle_tracker 已定义好各虚函数签名,接口信息如下:
struct ObstacleTrackerInitOptions : public BaseInitOptions {
float image_width;
float image_height;
};
struct ObstacleTrackerOptions {};
struct CameraFrame {
// timestamp
double timestamp = 0.0;
// frame sequence id
int frame_id = 0;
// data provider
DataProvider *data_provider = nullptr;
// calibration service
BaseCalibrationService *calibration_service = nullptr;
// hdmap struct
base::HdmapStructPtr hdmap_struct = nullptr;
// tracker proposed objects
std::vector<base::ObjectPtr> proposed_objects;
// segmented objects
std::vector<base::ObjectPtr> detected_objects;
// tracked objects
std::vector<base::ObjectPtr> tracked_objects;
// feature of all detected object ( num x dim)
// detect lane mark info
std::vector<base::LaneLine> lane_objects;
std::vector<float> pred_vpt;
std::shared_ptr<base::Blob<float>> track_feature_blob = nullptr;
std::shared_ptr<base::Blob<float>> lane_detected_blob = nullptr;
// detected traffic lights
std::vector<base::TrafficLightPtr> traffic_lights;
// camera intrinsics
Eigen::Matrix3f camera_k_matrix = Eigen::Matrix3f::Identity();
// narrow to obstacle projected_matrix
Eigen::Matrix3d project_matrix = Eigen::Matrix3d::Identity();
// camera to world pose
Eigen::Affine3d camera2world_pose = Eigen::Affine3d::Identity();
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
} EIGEN_ALIGN16; // struct CameraFrame
实现新类 NewObstacleTracker¶
为了确保新的匹配算法能顺利工作,NewObstacleTracker 至少需要重写 base_obstacle_tracker 中定义的接口Init(),Track()和Name()。其中Init()函数负责完成加载配置文件,初始化类成员等工作;而Track()则负责实现算法的主体流程。一个具体的NewObstacleTracker.cc实现示例如下:
注意:当前版本base_obstacle_tracker.h尚未将算法流程封装到Track()函数中,需要完全重写其所有接口函数。
namespace apollo {
namespace perception {
namespace camera {
bool NewObstacleTracker::Init(const ObstacleTrackerInitOptions& options) {
/*
你的算法初始化部分
*/
}
bool NewObstacleTracker::Track(const ObstacleTrackerInitOptions& options,
CameraFrame *frame) {
/*
你的算法实现部分
*/
}
bool NewObstacleTracker::Predict(const ObstacleTrackerOptions &options,
CameraFrame *frame) {
/*
你的算法实现部分--预测
*/
}
bool Associate2D(const ObstacleTrackerOptions &options,
CameraFrame *frame){
/*
你的算法实现部分--2D匹配
*/
}
bool Associate3D(const ObstacleTrackerOptions &options,
CameraFrame *frame){
/*
你的算法实现部分--3D匹配
*/
}
std::string NewObstacleTracker::Name() const {
/*
返回你的匹配算法名称
*/
}
REGISTER_OBSTACLE_TRACKER(NewObstacleTracker); //注册新的camera_obstacle_tracker
} // namespace camera
} // namespace perception
} // namespace apollo
为新类 NewObstacleTracker 配置param的proto文件¶
按照下面的步骤添加新camera匹配算法的参数信息:
根据算法要求为新camera匹配算法配置param的
proto文件。当然,如果参数适配,您也可以直接使用现有的proto文件,或者对现有proto文件进行更改。作为示例,可以参考以下位置的omt的proto定义:modules/perception/camera/lib/obstacle/tracker/omt/proto/omt.proto。定义完成后在文件头部输入以下内容:syntax = "proto2"; package apollo.perception.camera.NewObstacleTracker; //你的param参数
参考
omt_obstacle_tracker在目录modules/perception/production/data/perception/camera/models/中创建new_obstacle_tracker文件夹,并根据需求创建*.pt文件:注意:此处 "*.pt" 文件应对应步骤1中的proto文件格式.
更新config文件使新的算法生效¶
要使用Apollo系统中的新camera匹配算法,需要根据需求依次对以下config文件进行配置:
参考如下内容更新
modules/perception/production/conf/perception/camera/obstacle.pt文件,将之前步骤中新建的*.pt配置到加载路径中:tracker_param { plugin_param{ name : "NewObstacleTracker" root_dir : "/apollo/modules/perception/production/data/perception/camera/models/new_obstacle_tracker" config_file : "*.pt" } }
若需要对步骤1中
tracker_param的结构更新,或需要新增其他_param,可在modules/perception/camera/app/proto/perception.proto文件中操作:message PluginParam { optional string name = 1; optional string root_dir = 2; optional string config_file = 3; } message TrackerParam { optional PluginParam plugin_param = 1; }
若步骤1中不直接使用
obstacle.pt文件,而使用其他新建的*.pt文件,则需要更改modules/perception/production/conf/perception/camera/fusion_camera_detection_component.pb.txt. 其对应的proto文件为modules/perception/onboard/proto/fusion_camera_detection_component.proto:camera_obstacle_perception_conf_dir : "/apollo/modules/perception/production/conf/perception/camera" camera_obstacle_perception_conf_file : "NewObstacleTracker.pt"
在完成以上步骤后,您的新camera匹配算法便可在Apollo系统中生效。