循迹搭建–车辆循迹演示¶
概览¶
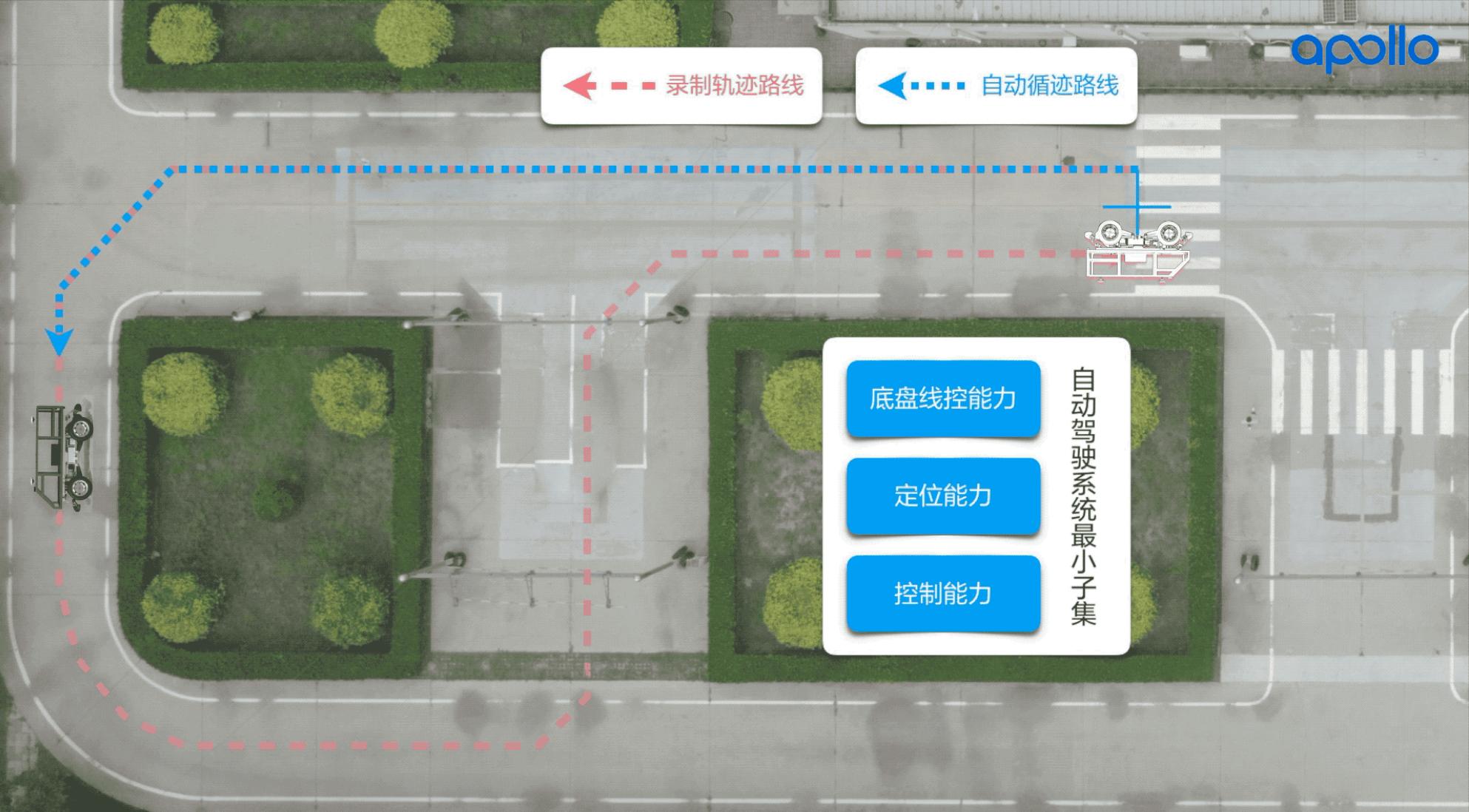
该用户手册旨在帮助用户在开发套件上实现循迹功能。
循迹作为自动驾驶的最小闭环子集,在硬件上需要搭建自动驾驶最小系统的集成,在软件上实现相关模块的配置、标定、启动等工作,才能进行循迹的操作演示。在循迹过程中,既考验开发者在前述准备工作的掌握程度,又能够很直观的感受到自动驾驶的使用体验。
车辆配置文件准备¶
在
/apollo/modules/calibration/data/目录下列出了Apollo支持车型的配置参数。在
/apollo/modules/calibration/data/文件夹下,我们为开发套件提供了默认的参数,请务必按照前述前提条件的步骤进行配置,否则会导致循迹启动失败。在完成前提条件准备工作后,下面开始启动循迹操作。
循迹启动¶
1. 启动can卡¶
启动工控机后,首先进入CAN卡目录启动CAN驱动,在桌面上打开命令行终端(Terminal),操作如下命令
cd ~/SocketCan/
bash start.sh
正确操作后,会返回如下显示,证明CAN驱动启动成功:
2. 编译项目,启动Dreamview¶
进入docker环境,用gpu编译项目,启动DreamView
cd /apollo
bash docker/scripts/dev_start.sh
bash docker/scripts/dev_into.sh
bash apollo.sh build_opt_gpu
bash scripts/bootstrap.sh
3. 启动所需模块¶
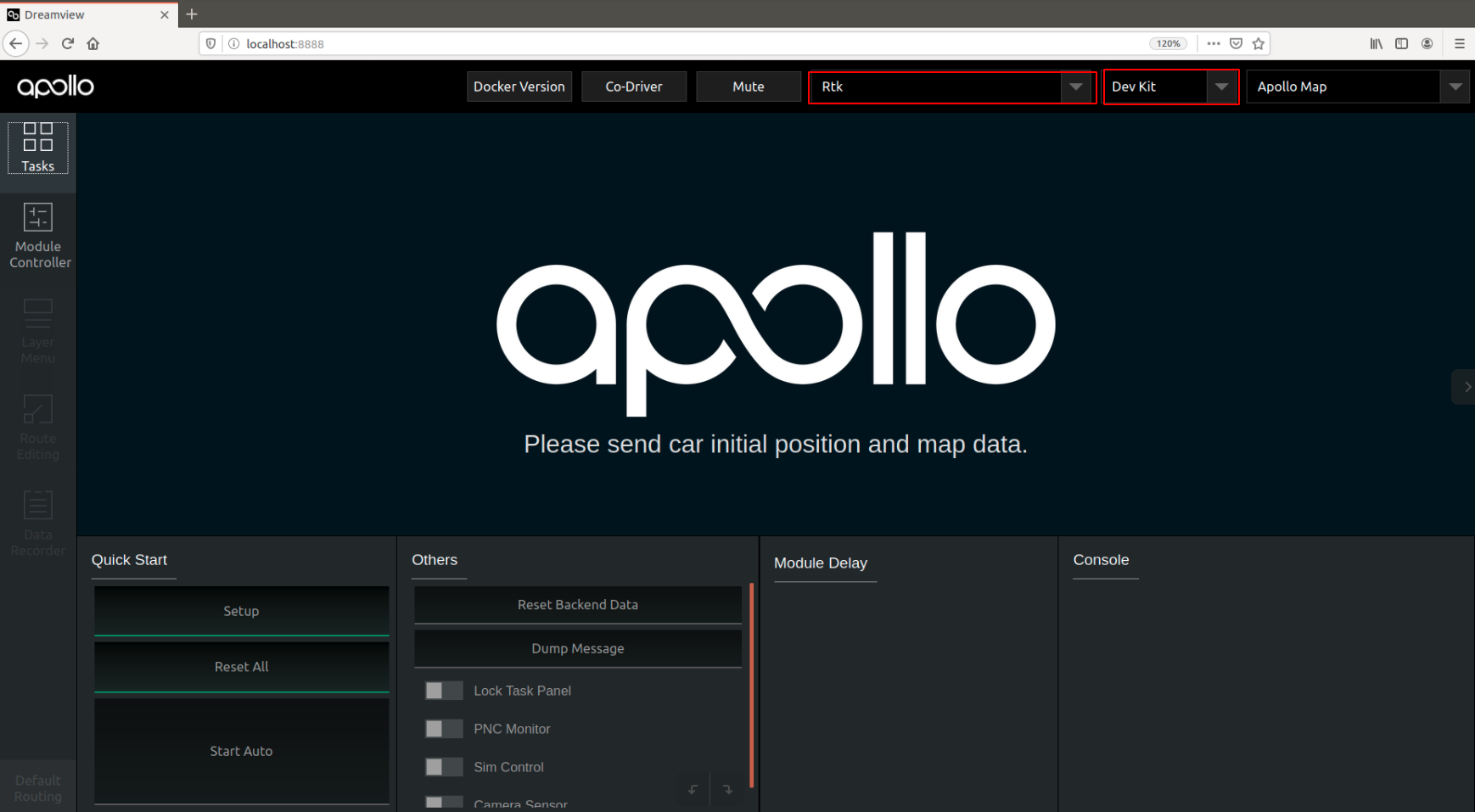
在浏览器中打开(http://localhost:8888),在--setup mode--内,选择模式为Rtk, 在--vehicle--选择车型,根据车辆铭牌信息选择对应的车型(见下表),如使用Apollo D-KIT Lite,则在--vehicle--选择车型Dev Kit。
铭牌信息 |
选择车型 |
|---|---|
Apollo D-KIT Lite |
dev_kit |
Apollo D-KIT Standard |
dev_kit_standard |
Apollo D-KIT Advanced(NE-B) |
dev_kit_advanced_ne-b |
Apollo D-KIT Advanced(NE-S) |
dev_kit_advanced_ne-s |
Apollo D-KIT Advanced(SNE-R) |
dev_kit_advanced_sne-r |
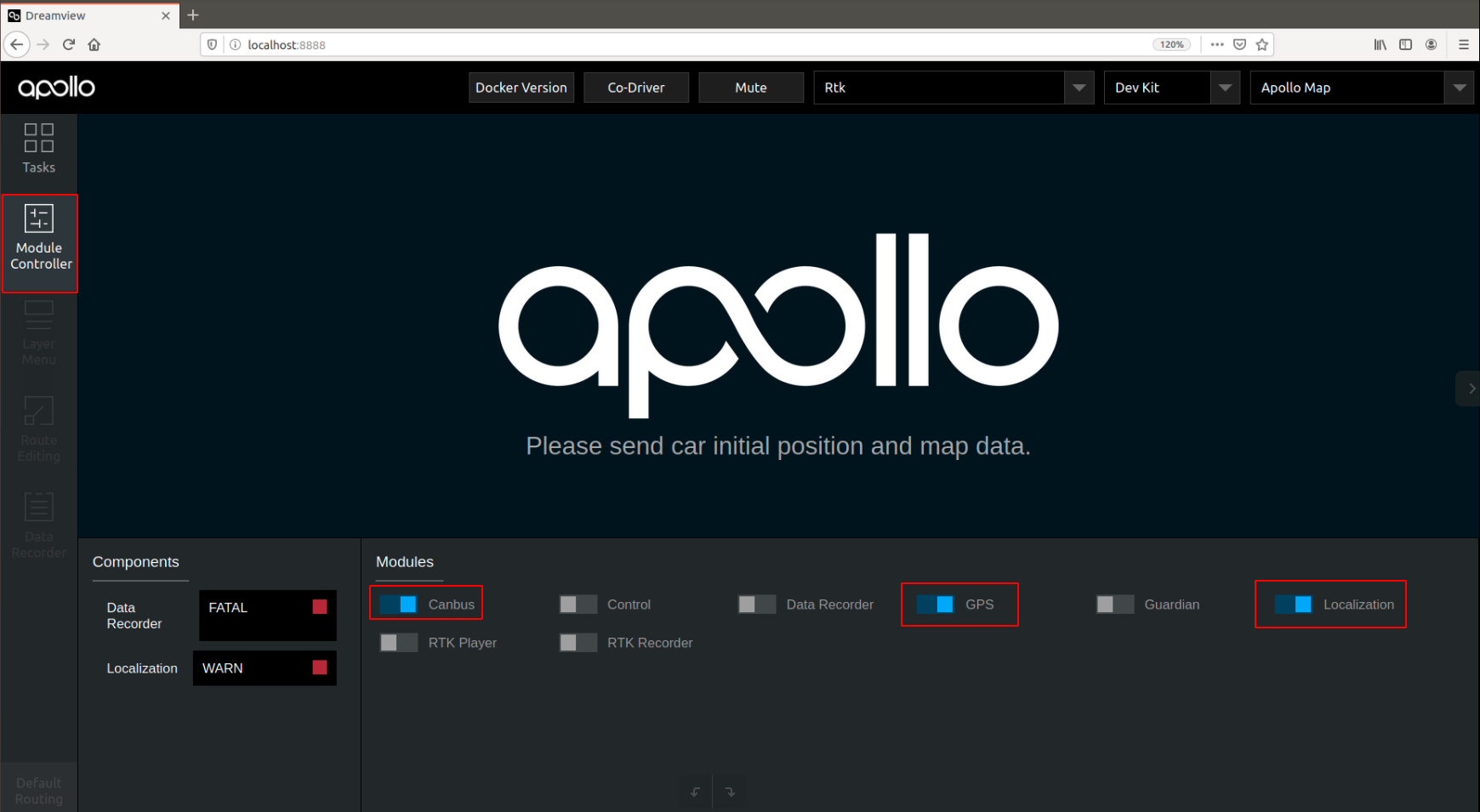
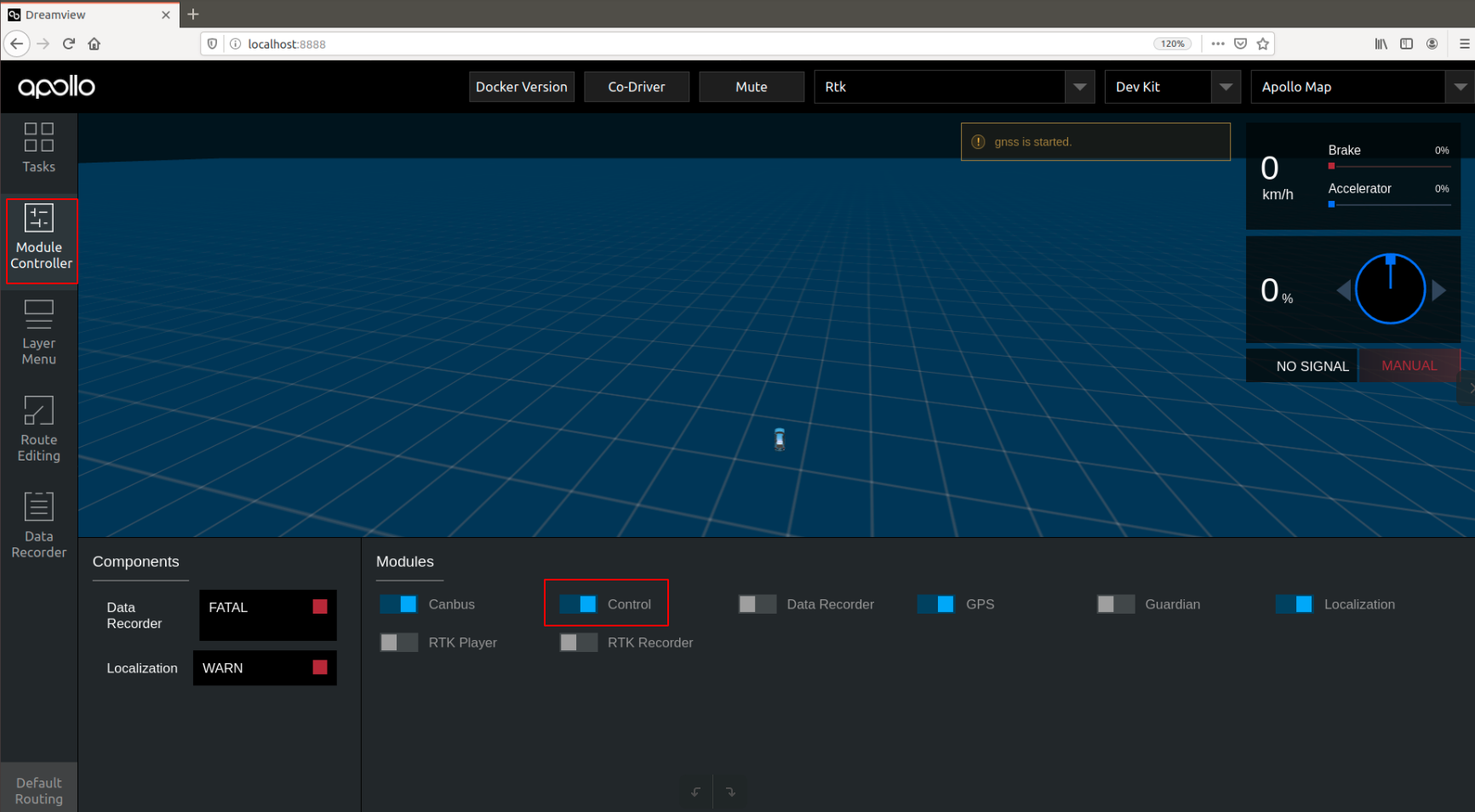
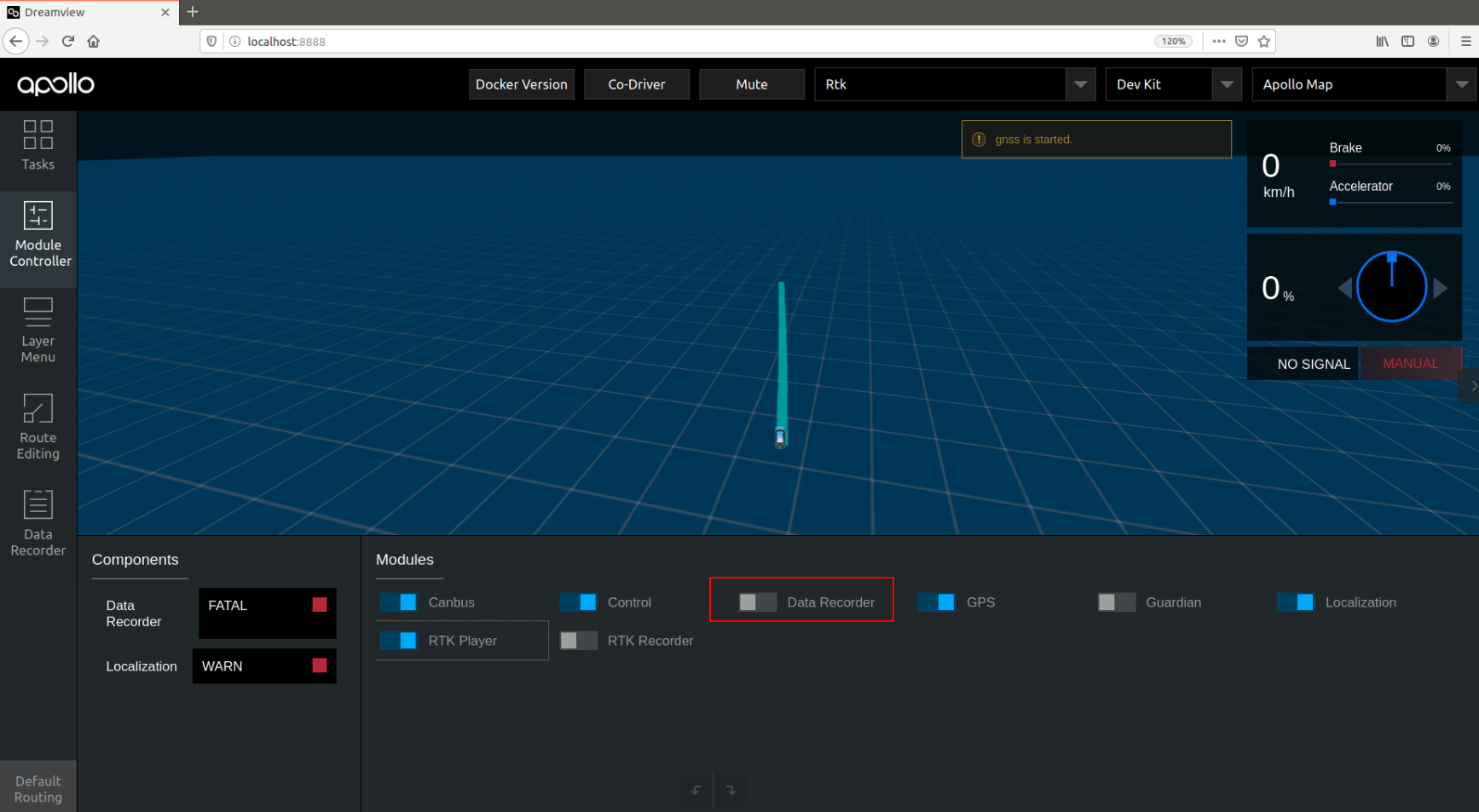
在页面左上角处点击Module Controller页面标签,进入到软件模块启动界面,
点击侧启动Canbus模块、GPS模块、Localization模块:
4. 检查各模块数据是否正确¶
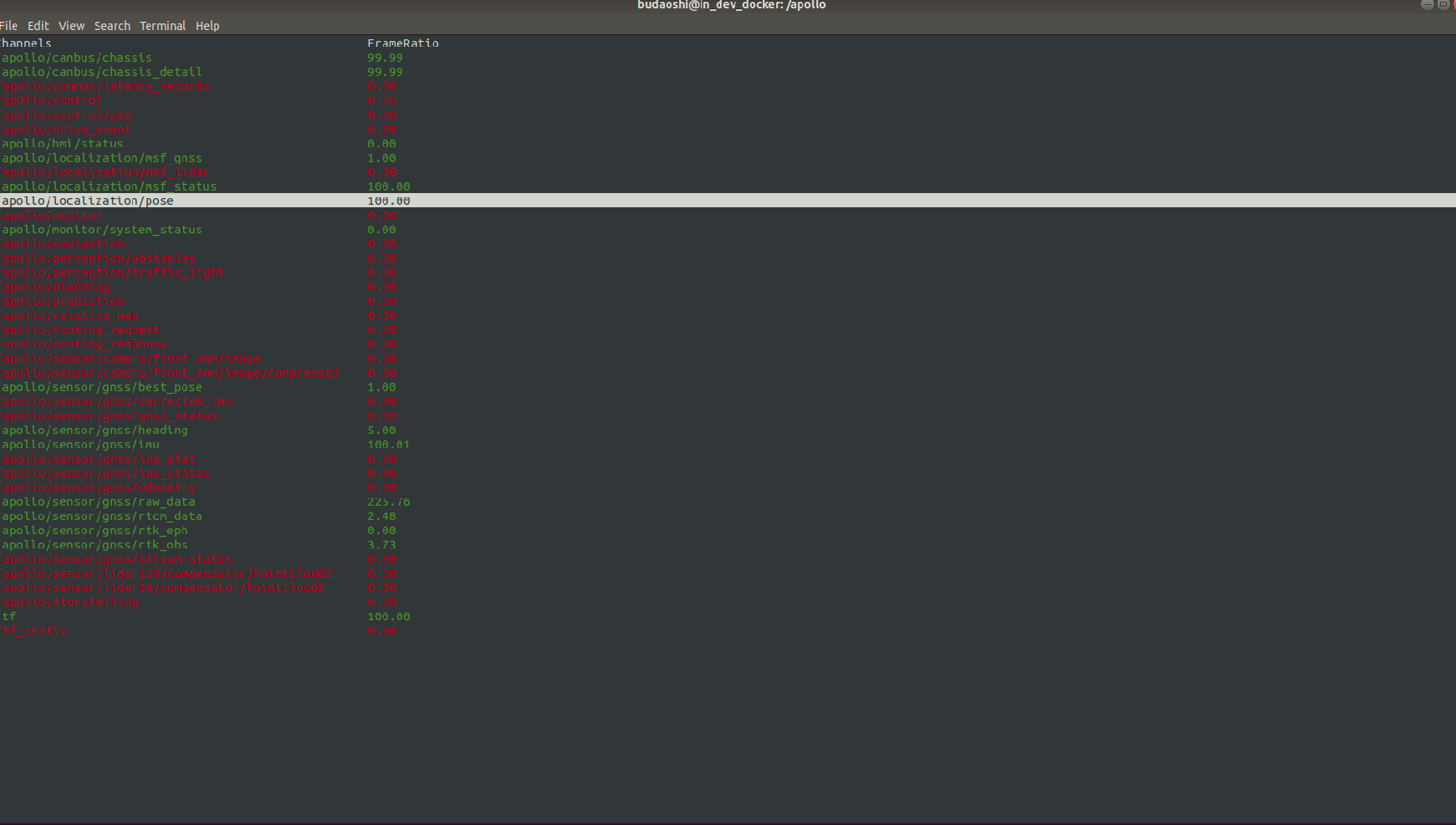
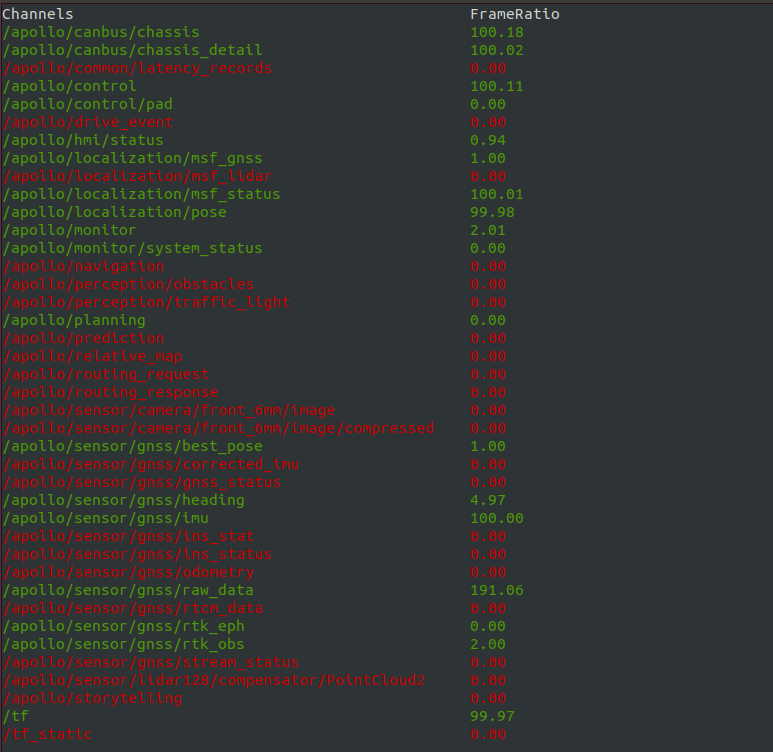
在docker中输入cyber_monitor命令并检查以下channel(使用上下方向键选择channel,使用右方向键查看channel详细信息。关于cyber_monitor更详细使用,请参考CyberRT_Developer_Tools):
channel_name |
检查项目 |
|---|---|
|
确保能正常输出数据 |
|
确保能正常输出数据 |
|
确保能正常输出数据、 |
|
确保能正常输出数据 |
如下图所示
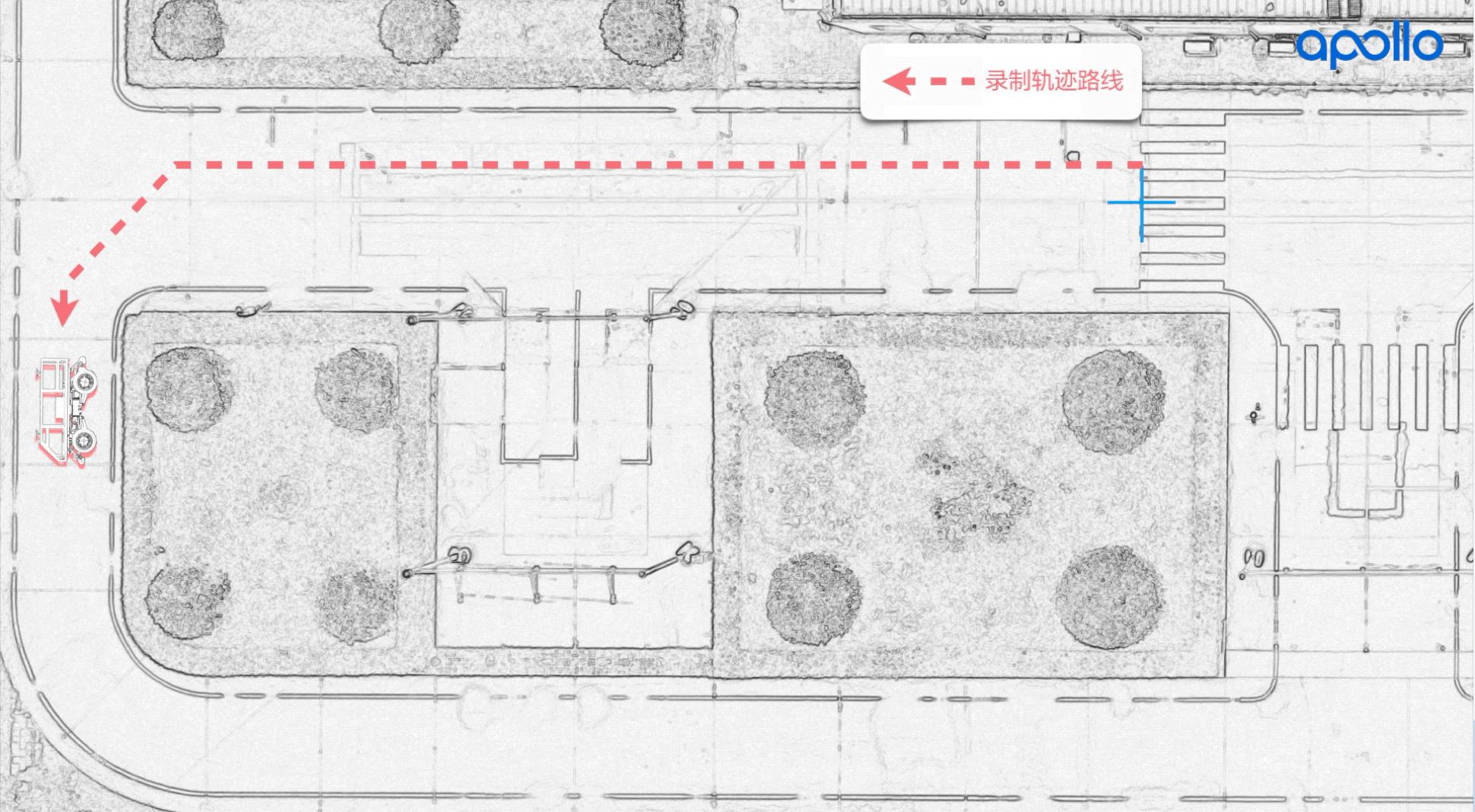
5. 循迹录制¶
1)在空旷场地内,将车辆遥控至循迹起点,记录此时车辆车头方向和所在位置:
将遥控器按钮置于
手动驾驶模式;记录此时车辆起点位置;
注: 可以在车辆左前轮处画一个十字符号,记录车辆的起点。
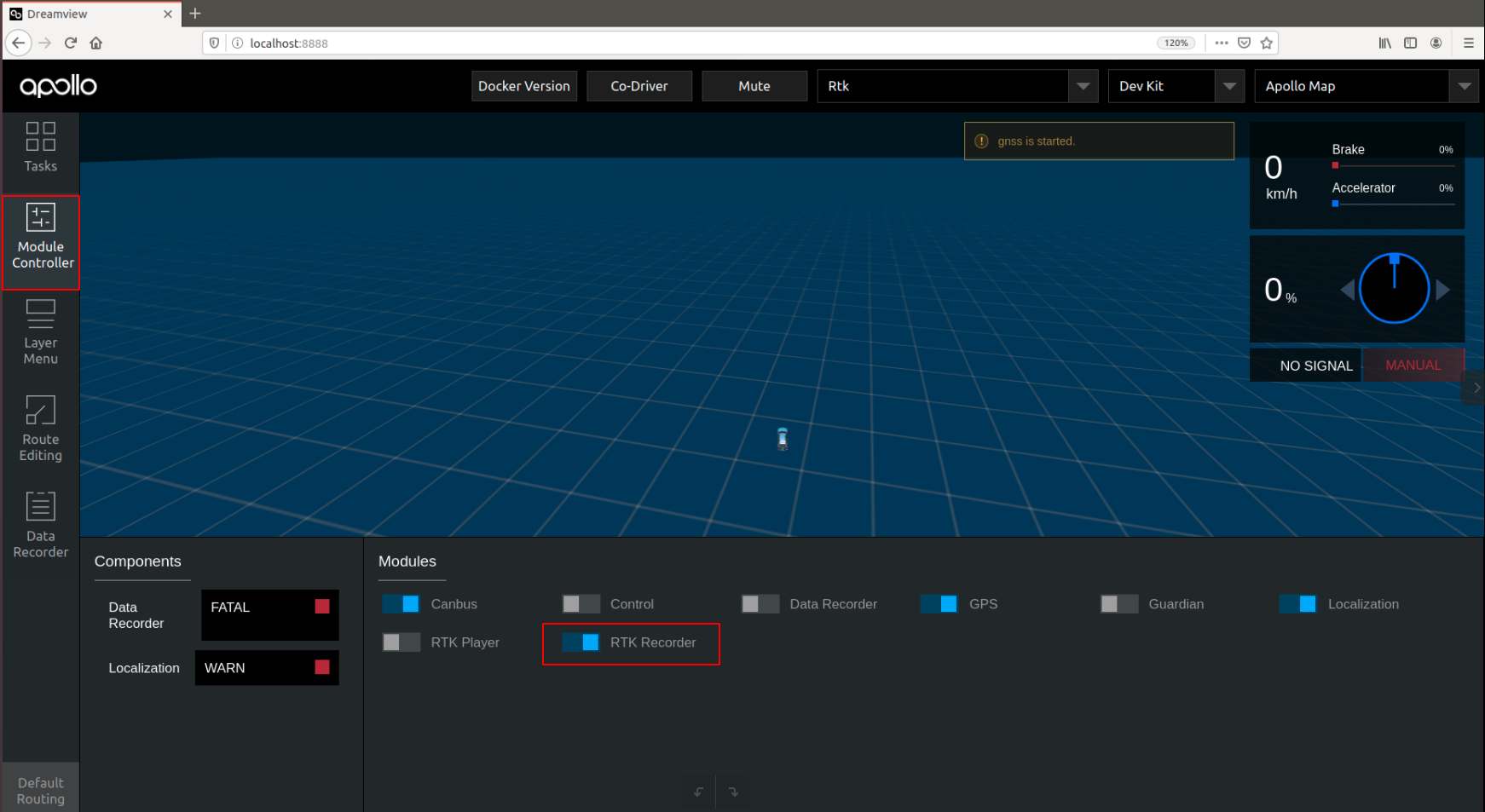
2)启动Rtk_Recorder录制循迹数据:
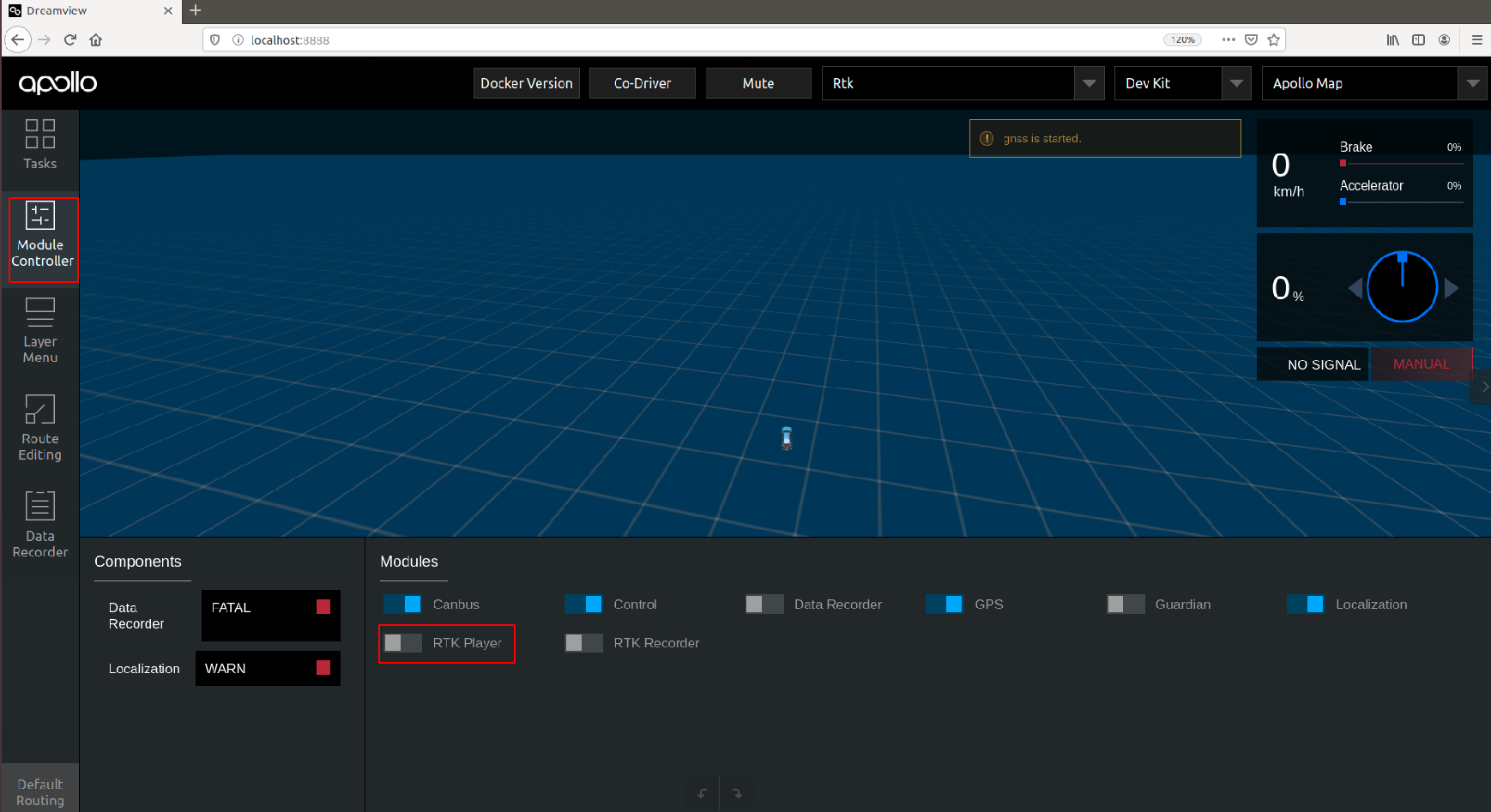
在
Dreamview页面内,在Module Controller,点击RTK Recorder按钮,启动循迹录制,录制循迹数据:
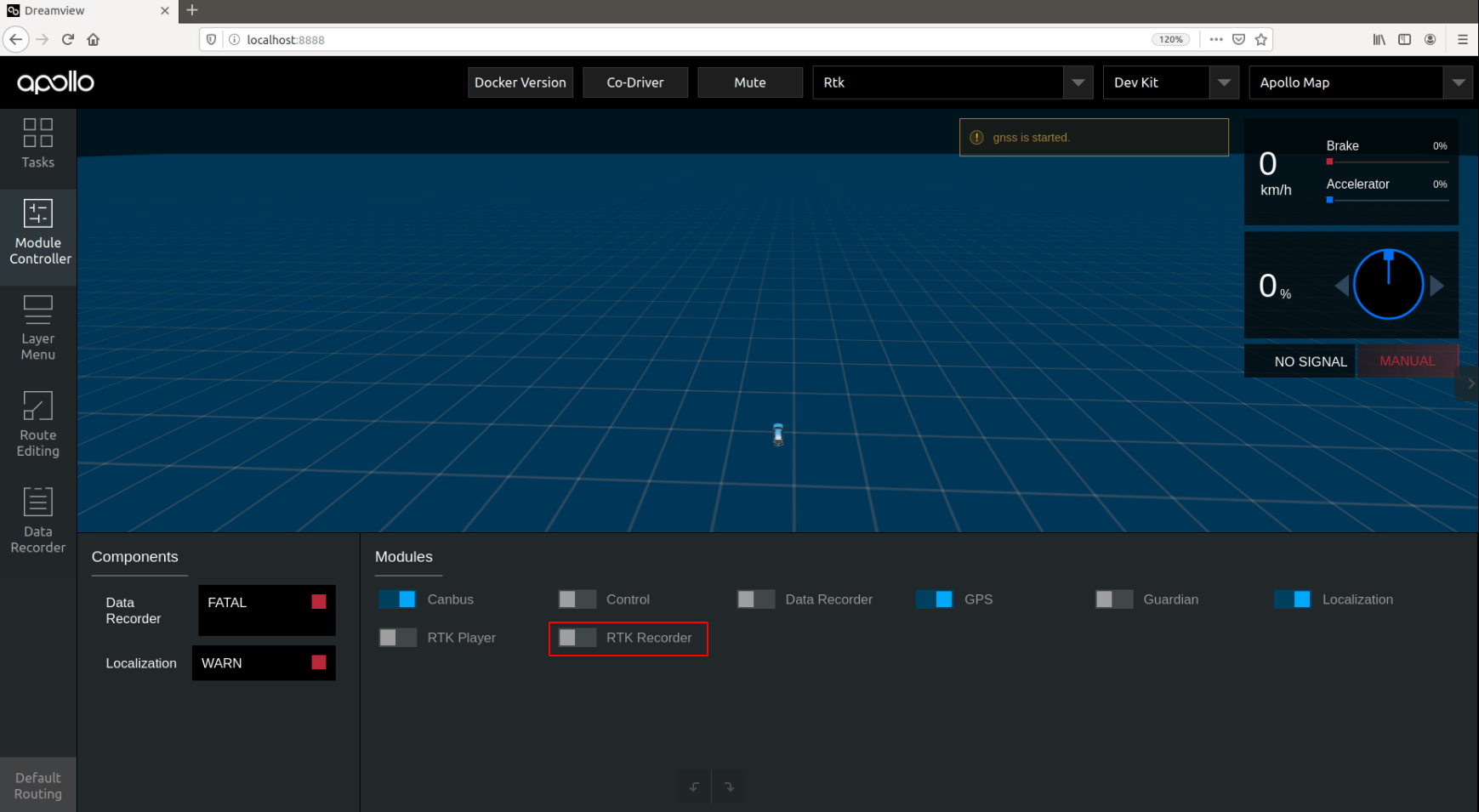
这时使用遥控器,遥控车辆前进一段轨迹,到达期望的终点,车辆停止后,在
Dreamview页面点击RTK Recorder按钮,关闭循迹数据录制。注意:请务必在车辆到达终点后快速关闭
RTK Recorder按钮,否则可能会导致记录多余无用数据,或者只打开不关闭RTK Recorder按钮,可能会导致后续循迹回放无法进行!
结束录制循迹轨迹后,录制的循迹数据在
apollo/data/log/garage.csv中,文件内包含了车辆的轨迹、速度、加速度、曲率、档位、油门、刹车、转向等信息。
6. 循迹回放¶
1)将车辆移动至之前循迹录制时标记的起点:
注意车辆的起点位置和车头朝向都尽量与循迹录制时起点保持一致;
遥控器放权。
2)启动Rtk_Player进行循迹回放:
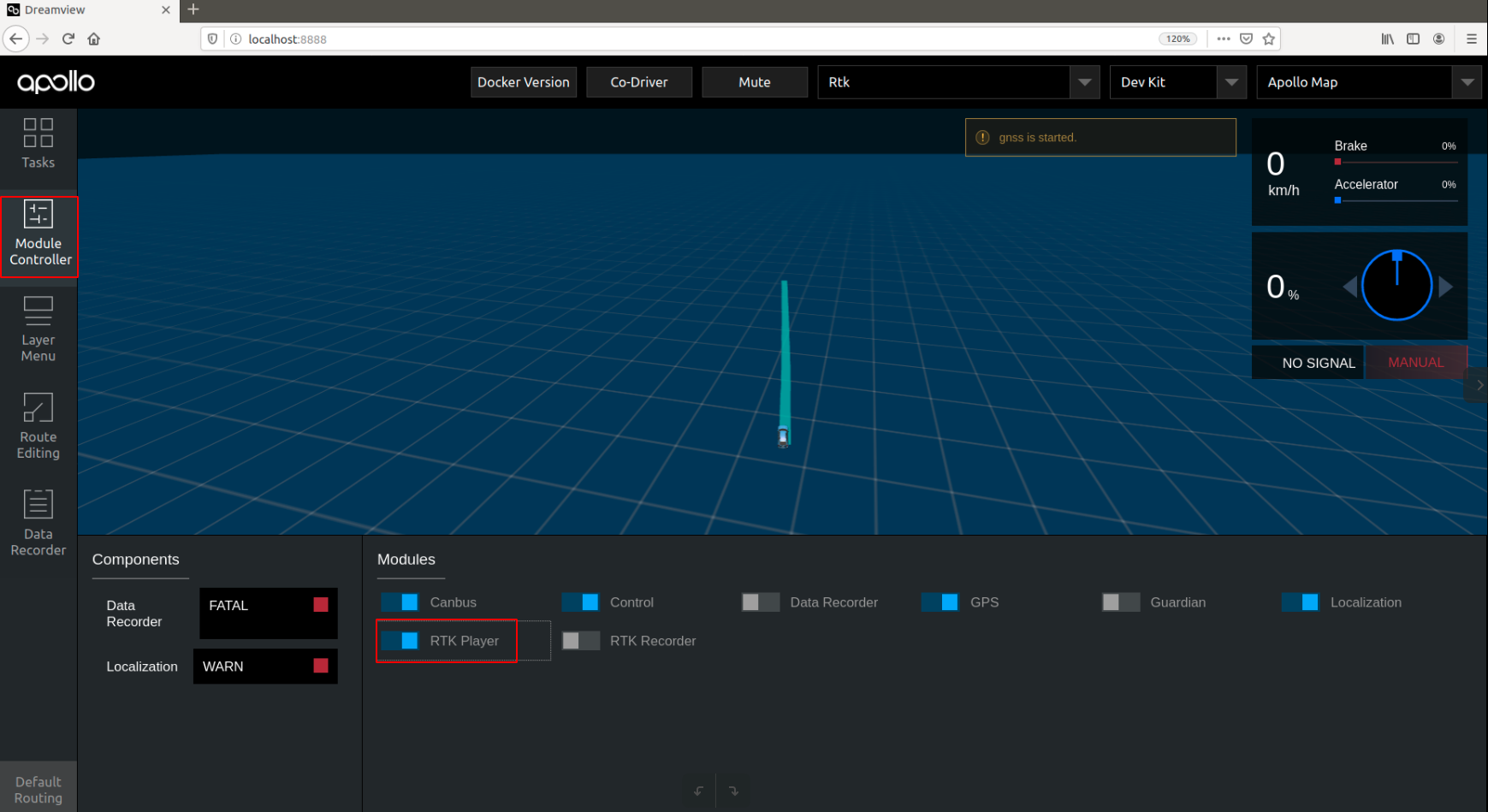
启动
control模块:在Dreamview页面Module Controller标签页内,点击Control按钮,启动control模块。
点击
Rtk Player按钮,启动循迹回放,这时会看到车辆前方出现一条蓝色的轨迹线,这条轨迹线就是刚才循迹录制的那条轨迹线;
第一次尝试循迹时,先检查
dreamview是否有清晰无毛刺的蓝色规划轨迹,请确认轨迹是否与期望的大致相符,如果相差很大,比如本来录制的是直行,而蓝色轨迹显示的大幅度转弯,此时要小心测试,谨防危险。这时车辆还不会进入自动驾驶,这一步只是把循迹数据放出来,如果车辆没有前进,则会不断
replan。
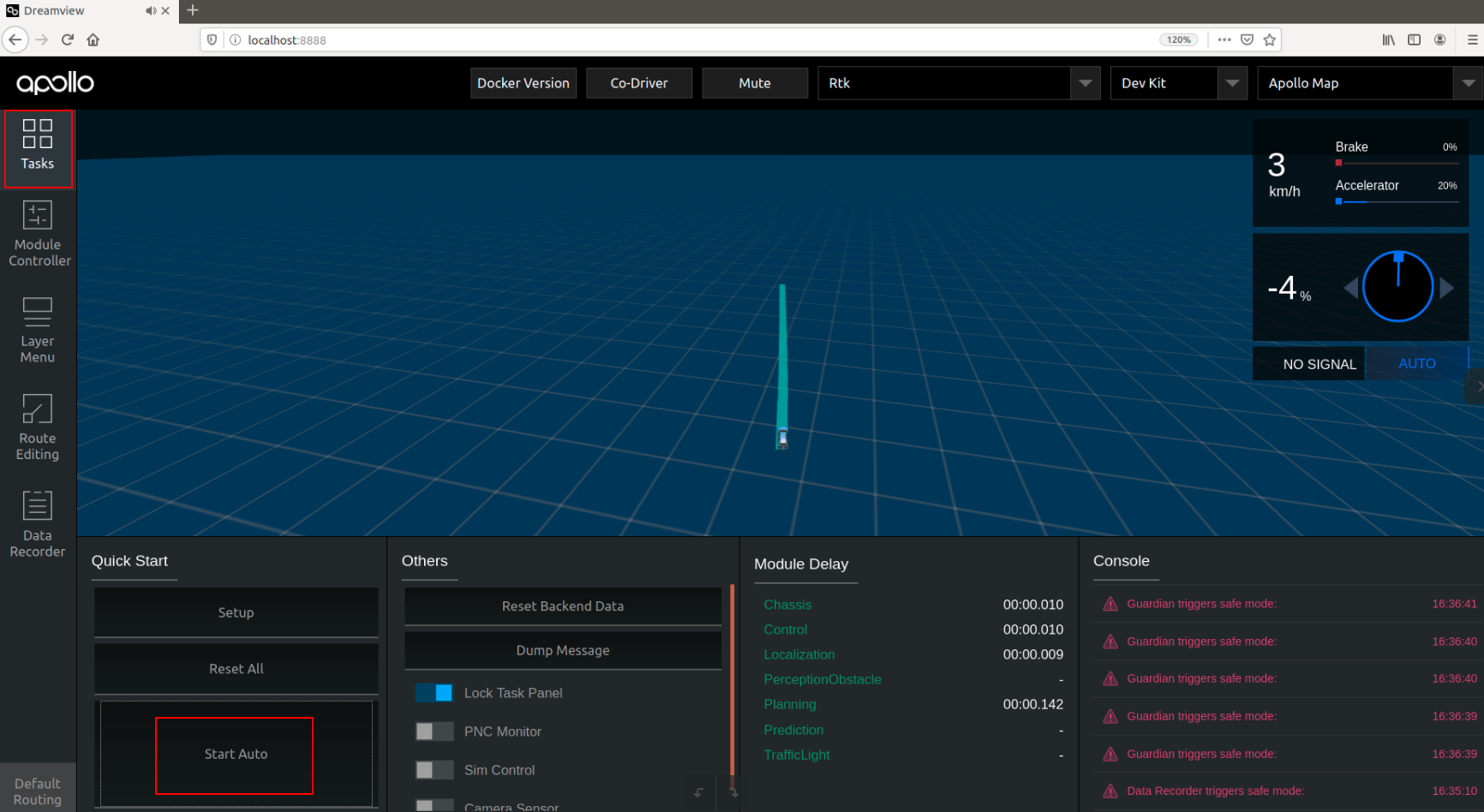
3)然后在Dreamview中Task标签内,点击Start Auto,这时候车辆开始启动,可能开始起步比较猛,多注意接管。
4)车辆循迹自动驾驶至终点后,车辆停止,这时使用遥控器首先接管车辆,然后在Dreamview页面Module Controller标签页内,再次点击Rtk Player按钮关闭循迹回放。
注意事项:一定要在宽阔的场地进行测试,确保周围没有人,循迹测试之前做好应急接管准备,有问题随时遥控器接管。不要轻易尝试速度大于4m/s(16km/h)的循迹。
5)记录循迹自动驾驶Record数据包,可以在第(3)步开始钱,在Dreamview页面Module Controller标签页内,点击Data Recorder按钮,录制循迹自动驾驶的Record数据包,车辆循迹结束后,记得再次点击Data Recorder按钮关闭录制(注意:如果只打开不关闭,可能会导致录制的数据包不完整,造成后续使用该数据包失败!),该数据包可以用于后续在实验室查看循迹数据、回放循迹来使用。
录制的
Record数据包存储在/apollo/data/bag目录中,每一次的录制数据包会存储在以时间戳命名的文件夹内,(注意:数据包会在apollo/data/bag/文件夹下生成2个年月日时分秒相似的文件夹,分别以年-月-日-时-分-秒和年-月-日-时-分-秒_s命名,开发者可以不用理会_s后缀的文件夹,只需要使用年-月-日-时-分-秒文件夹内录制的标定数据即可)。
7. 再次循迹¶
如果想再次循迹其它轨迹路径,可以重复步骤5-6,完成不同轨迹的循迹演示。
调试¶
1. 底盘连接是否正常¶
硬件连接:确保CAN硬件连接线CAN0和车辆线控底盘连接正常,进入apollo docker环境,输入以下命令:
cd /apollo/scripts
bash bootstrap.sh
bash canbus.sh //启动canbus模块
cyber_monitor
在cyber_monitor界面中应该能看到如下的模块:
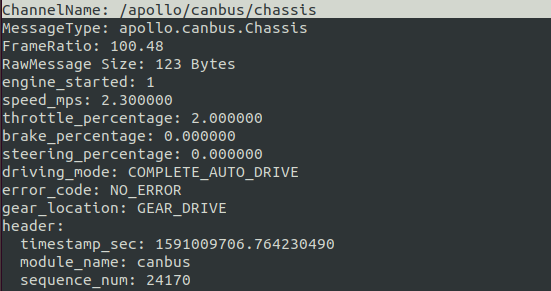
用键盘上下箭头移动光标选择chassis或者chassis_detail,选中后按右箭头可以进入查看详细信息,这些信息即是车辆底盘信息,chassis消息如下:
chassis detail消息如下:
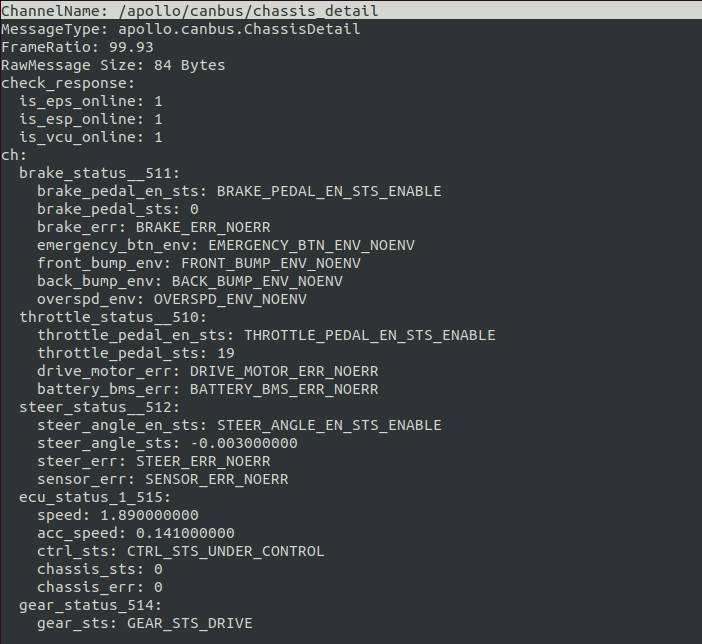
如果这些信息得到正确显示,说明CANBUS模块工作正常。如果不能显示底盘信息,很大可能是CANBUS有问题,或者底盘有问题,没有向上反馈底盘数据。 保证CANBUS的连接正确性,才能确定工控机计算单元可以控制车辆底盘,才能继续其它部分的调试。
2. canbus_teleop的使用¶
CANBUS能够连接底盘后,我们可以尝试控制底盘的运动。如果控制正常,则说明工控机计算单元下发命令后得到正确执行。 进入Ubuntu Docker环境,输入以下命令:
cd /apollo/scripts
bash canbus_teleop.sh
弹出界面如下:
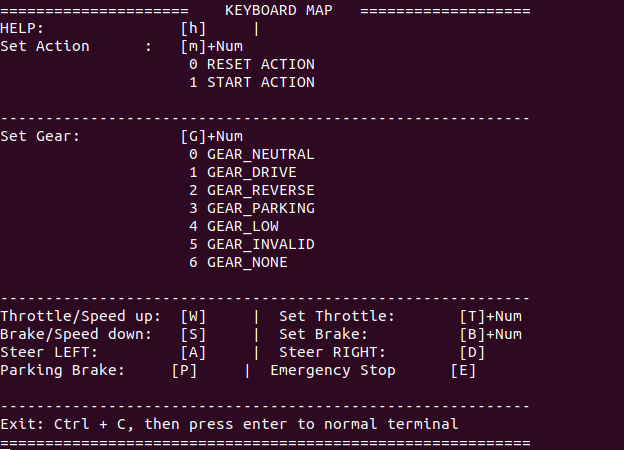
a 根据提示按m0重置系统,按m1是开始控制底盘。
b 按几次a或者d,看看车轮是否转动。
c 按g1,挂前进档,按几次w,看车辆是否前进,按几次s看车辆是否停下来。
请小心测试,不要轻易长时间连续按键,以防车辆突然高速动作发生事故。
常见问题¶
调试过程中,常见的问题及解决办法总结如下:
1. 网络断开或者网络太差无法进入docker¶
报错如下:

主要是因为网络没有连接上,或者网络太慢,请检查网路。
可以执行bash docker/scripts/dev_start.sh -n,-n参数表示不联网下载docker image更新,直接使用本地镜像。
2. 无法控制汽车底盘和读取底盘信号¶
具体表现是车辆下发油门转向等信号,底盘不执行,也读不到底盘的相关信息,这时候的原因应该是CAN不通。解决方法如下:
1)查看CAN线硬件是否连接合适;
2)如果(1)已经正确,但问题还存在,查看启动canbus前是否在docker外是否启动SocketCAN启动脚本start.sh;
3)如果(2)已经正确,但问题还存在,查看apollo/data/log/canbus.INFO是否有报错信息;
4)如果(3)尝试了,仍然没有解决,用CAN调试工具,看底盘是否有信号上报,以及apollo执行的时候,是否有命令下发。
3. Teleop进入不了自动驾驶模式¶
打开canbus.sh后,执行canbus_teleop.sh始终无法进入自动驾驶模式,CAN调试工具测量底盘信号是通的。这种情况,有可能是guidian模块打开造成,guidian模块是一种安全保护机制,开发者调试阶段,可以根据需要关掉。
打开/apollo/module/canbus/conf/canbus.conf:
修改--receive_guardian为--noreceive_guardian。
4. chassis_detail不显示¶
1)查看dreamview内否选择了Dev_Kit车型,如果不确认可以先选择其它车型后,重新选择Dev_Kit;
2)查看canbus配置文件/apollo/module/canbus/conf/canbus.conf内是否打开chassis_detail,如没有打开,把--noenable_chassis_detail_pub修改为enable_chassis_detail_pub,重启canbus后生效。
3)是否正确启动CAN驱动,查看启动canbus前是否在docker外是否启动SocketCAN启动脚本start.sh。
4)查看硬件CAN线接口有没有松动。
5. apollo系统第一次搭建完毕,测试发转角车辆实际转角不对¶
例如下发转向角10%,但是转动角度远超过转向最大角度的10%,可以在cyber_monitor中查看 /apollo/canbus/chassis及时观察底盘信号,apollo默认是Lincoln车型,如果使用者第一次搭建好apollo,还没有选择车型那么默认会按照mkz_example车型的最大转向角乘以百分比去执行。解决方法如下:检查modules/canbus/conf/canbus_conf.pb.txt中的配置,brand设置为正确的车型(例如CH),重启canbus,再尝试。如何仍然未解决,请运行bootstrap.sh脚本,在dreamview中选择对应的车型,选择Dev Kit开发套件,然后再执行前述步骤检查转角是否正确。
6.循迹回放中,点击Start Auto开始后,车辆不动¶
1)查看遥控器是否放权
7.循迹刹车地点不准确,或者刹车停不下来¶
很可能是标定没有做好,标定刹车部分没有做好,急刹缓刹都要考虑。
8.循迹效果不佳¶
纵向效果不好,请考虑标定表和PID参数调整以及车辆本身的信号(例如油门和刹车下发和上报是否一致),横向误差大,主要考虑LQR参数调整和车辆转向信号(下发和上报是否一致)。