DreamView用法介绍¶
DreamView是一个web应用程序,提供如下的功能:
可视化显示当前自动驾驶车辆模块的输出信息,例如规划路径、车辆定位、车架信息等。
为使用者提供人机交互接口以监测车辆硬件状态,对模块进行开关操作,启动自动驾驶车辆等。
提供调试工具,例如PnC监视器可以高效的跟踪模块输出的问题
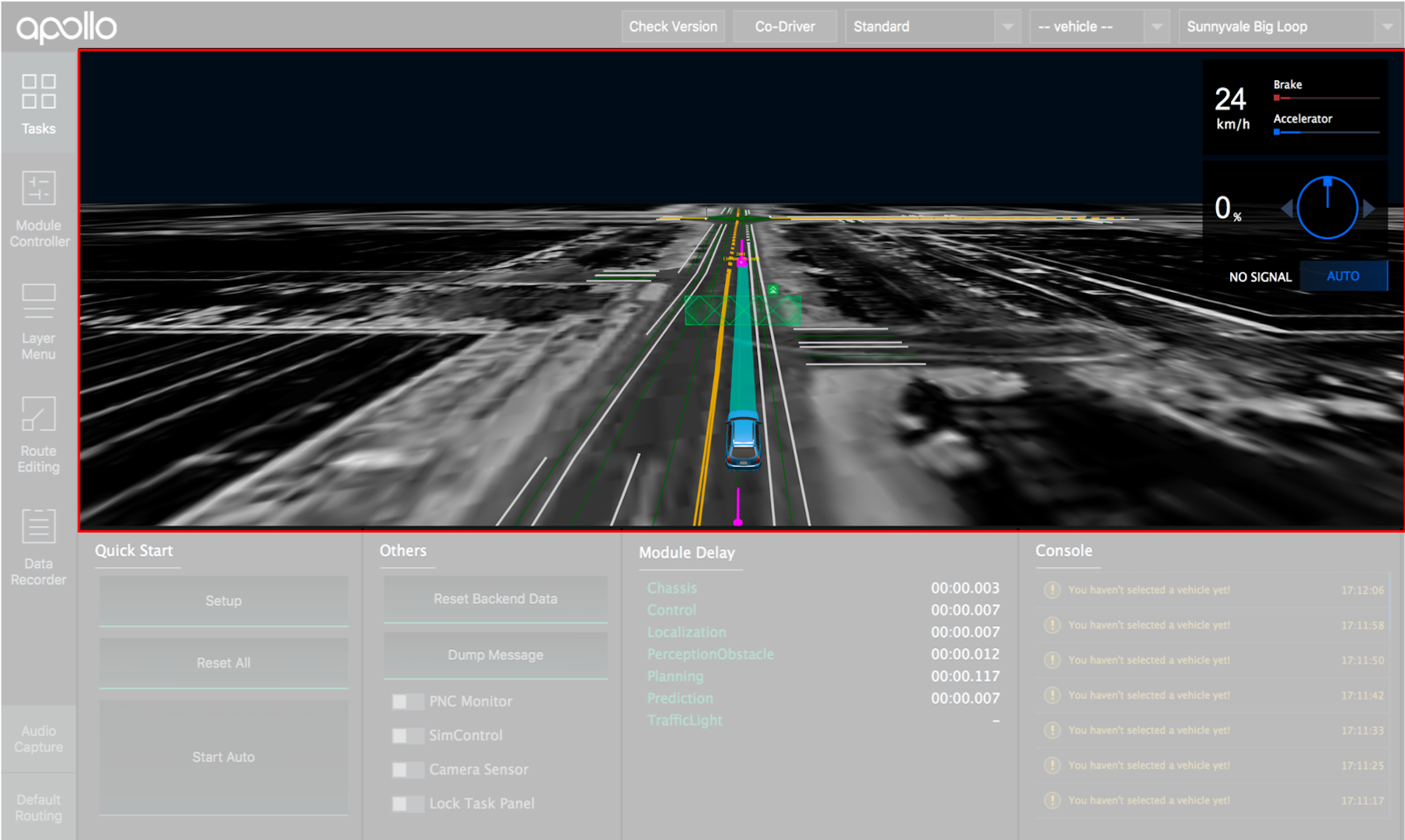
界面布局和特性¶
该应用程序的界面被划分为多个区域:标题、侧边栏、主视图和工具视图。
标题¶
标题包含4个下拉列表,可以像下述图片所示进行操作:
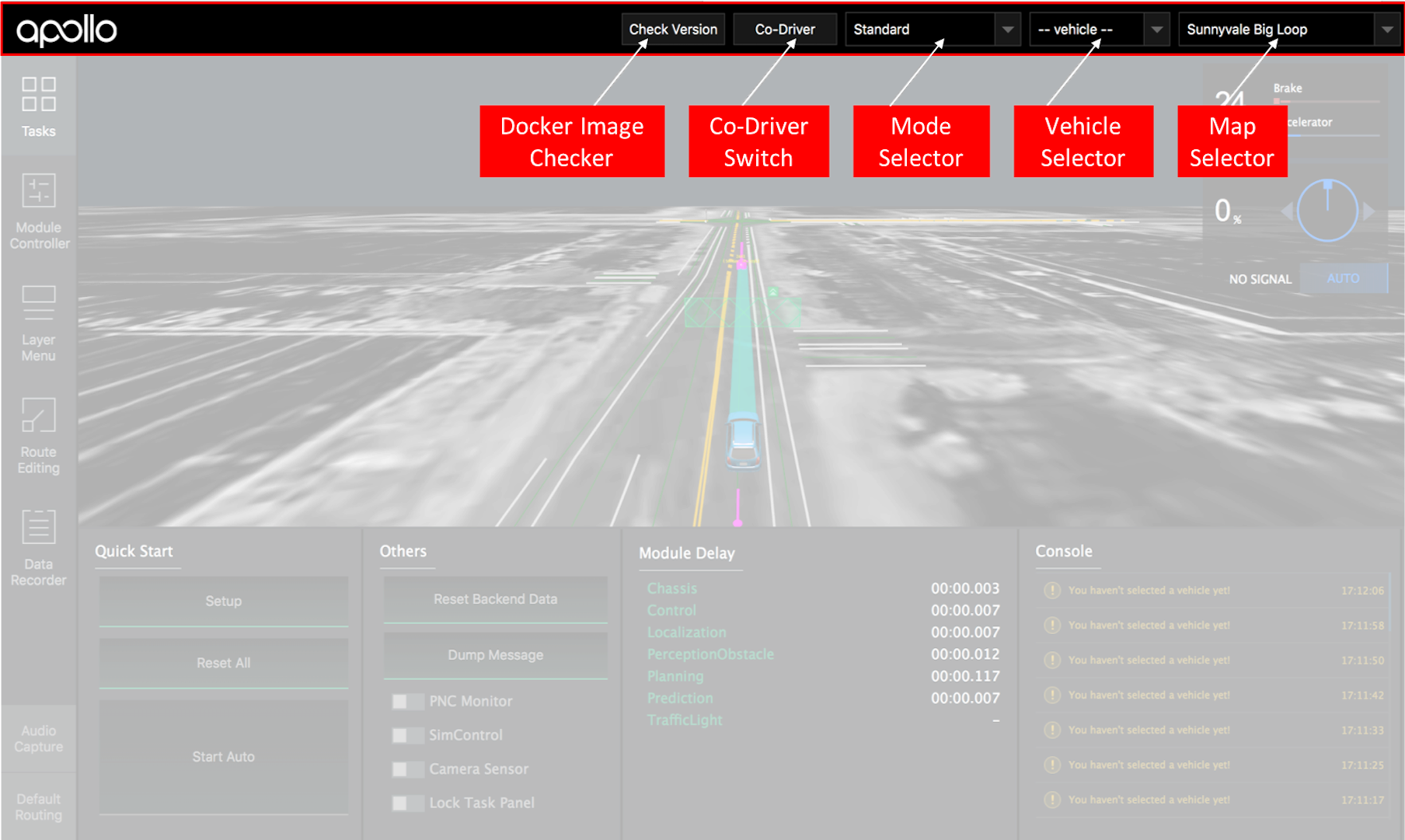
附注:导航模块是在Apollo 2.5版本引入的满足低成本测试的特性。在该模式下,Baidu或Google地图展现的是车辆的绝对位置,而主视图中展现的是车辆的相对位置。
侧边栏和工具视图¶
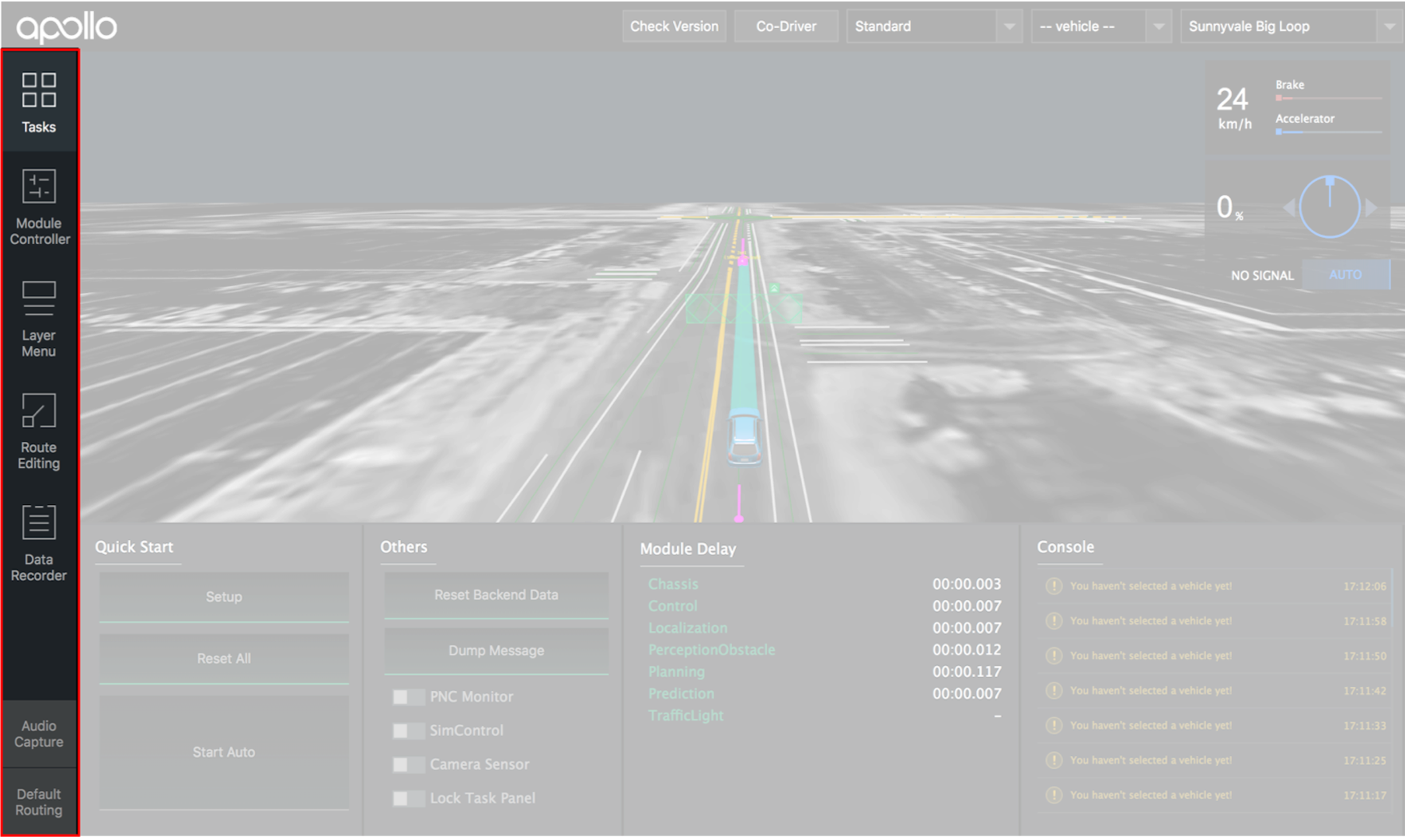 侧边栏控制着显示在工具视图中的模块
侧边栏控制着显示在工具视图中的模块
Tasks¶
在DreamView中使用者可以操作的tasks有:
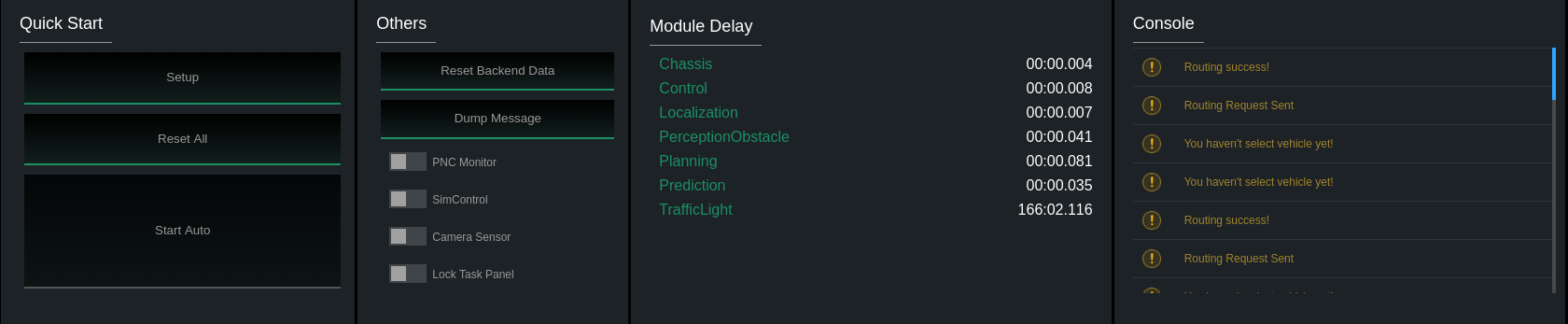
Quick Start: 当前选择的模式支持的指令。通常情况下,
setup: 开启所有模块
reset all: 关闭所有模块
start auto: 开始车辆的自动驾驶
Others: 工具经常使用的开关和按钮
Module Delay: 从模块中输出的两次事件的时间延迟
Console: 从Apollo平台输出的监视器信息
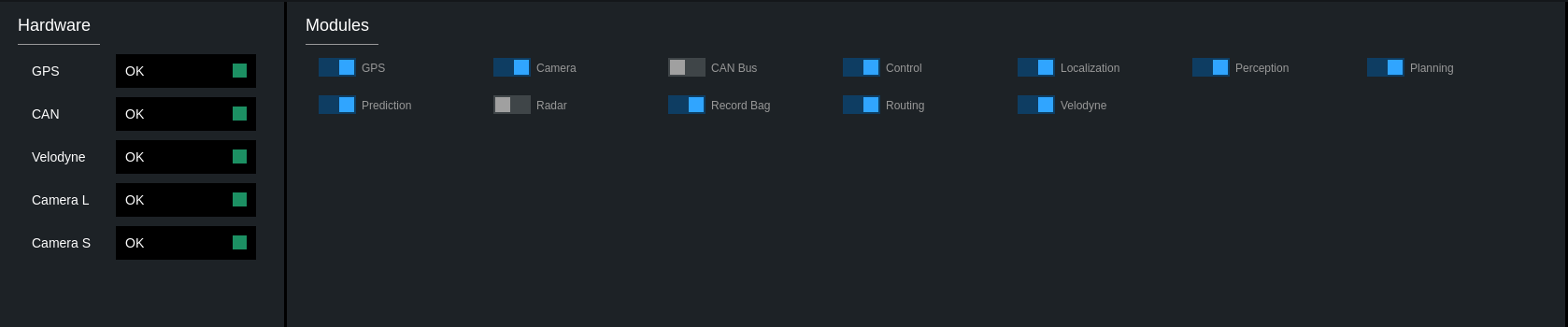
Module Controller¶
监视硬件状态和对模块进行开关操作
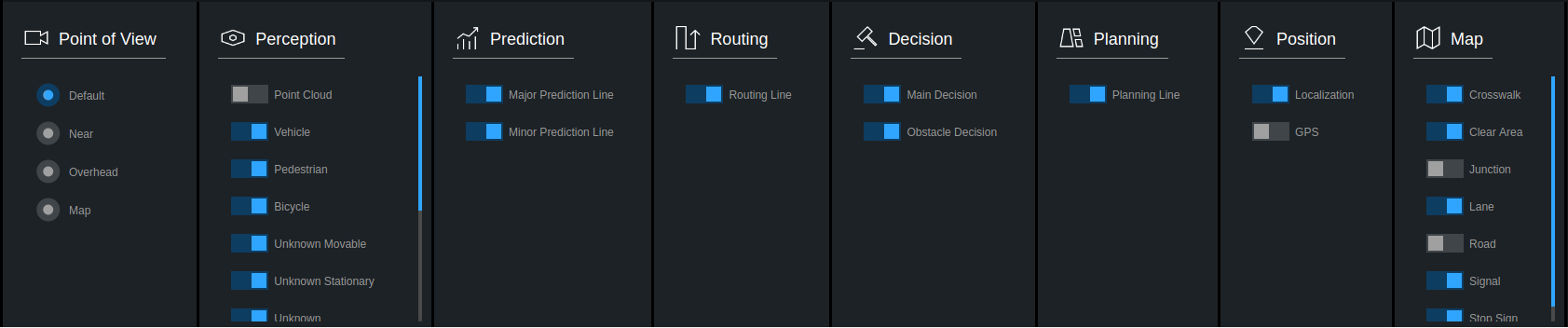
Layer Menu¶
显式控制各个元素是否显示的开关
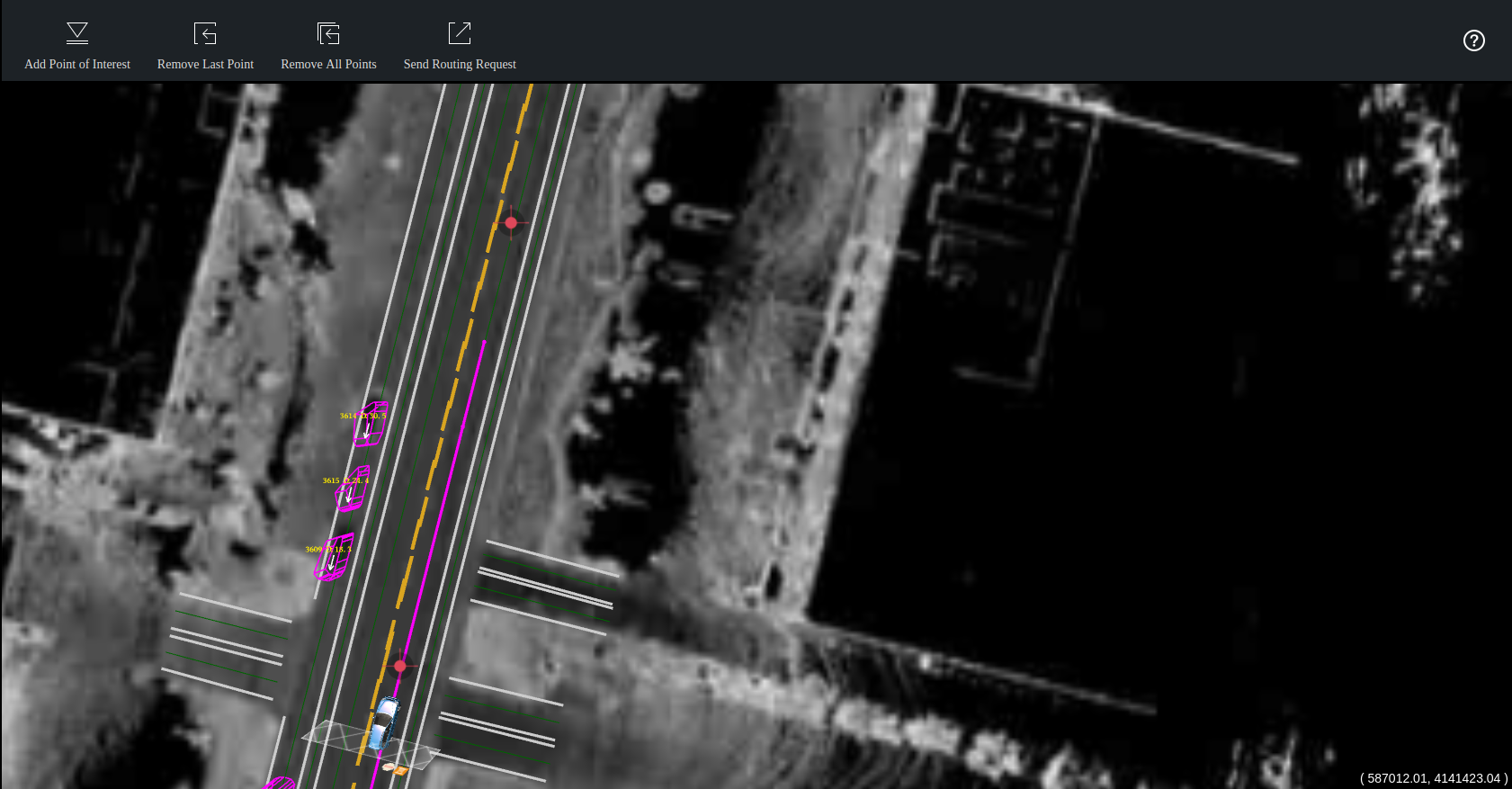
Route Editing¶
在向Routing模块发送寻路信息请求前可以编辑路径信息的可视化工具
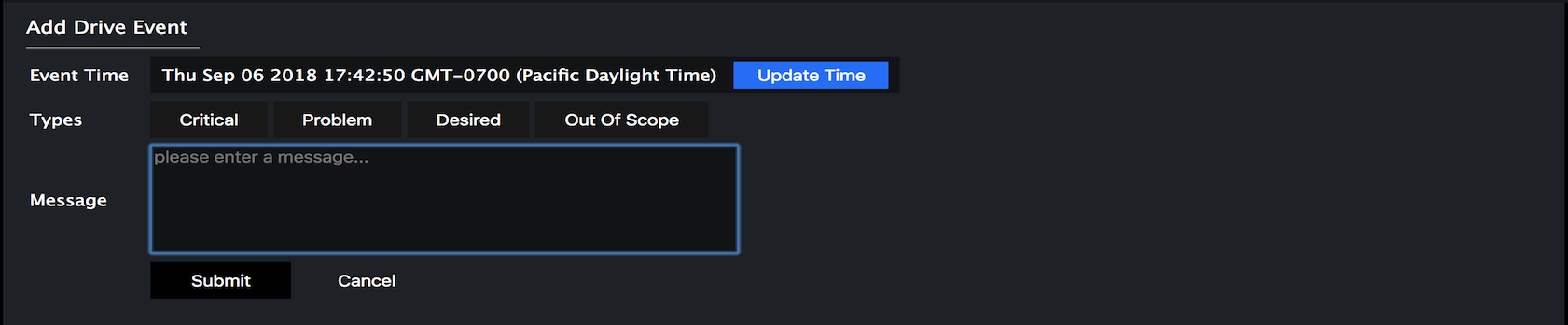
Data Recorder¶
将问题报告给rosbag中的drive event的界面
Default Routing¶
预先定义的路径或者路径点,该路径点称为兴趣点(POI)。
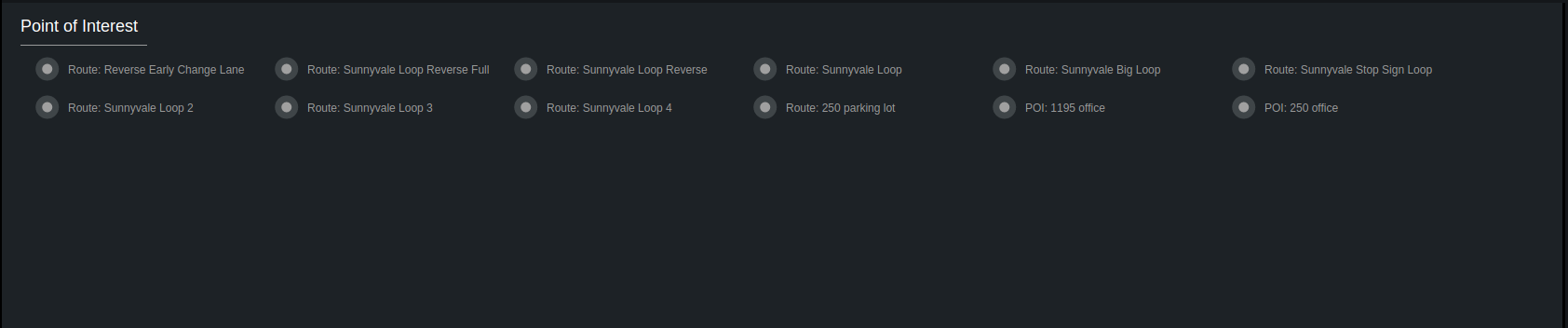
如果打开了路径编辑模式,路径点可被显式的在地图上添加。
如果关闭了路径编辑模式,点击一个期望的POI会向服务器发送一次寻路请求。如果只选择了一个点,则寻路请求的起点是自动驾驶车辆的当前点。否则寻路请求的起点是选择路径点中的第一个点。
查看Map目录下的default_end_way_point.txt文件可以编译POI信息。例如,如果选择的地图模式为“Demo”,则在modules/map/data/demo目录下可以查看对应的 default_end_way_point.txt 文件。
主视图¶
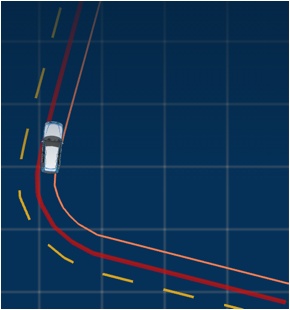
主视图在web页面中以动画的方式展示3D计算机图形
下表列举了主视图中各个元素:
Visual Element |
Depiction Explanation |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|


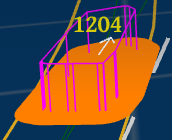

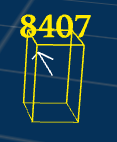
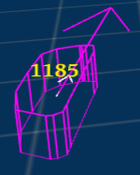
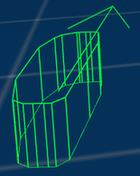
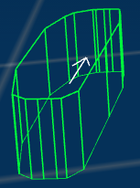
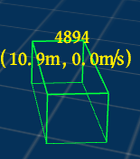
障碍物¶
Visual Element |
Depiction Explanation |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
黄色文字表示:
|
|
|



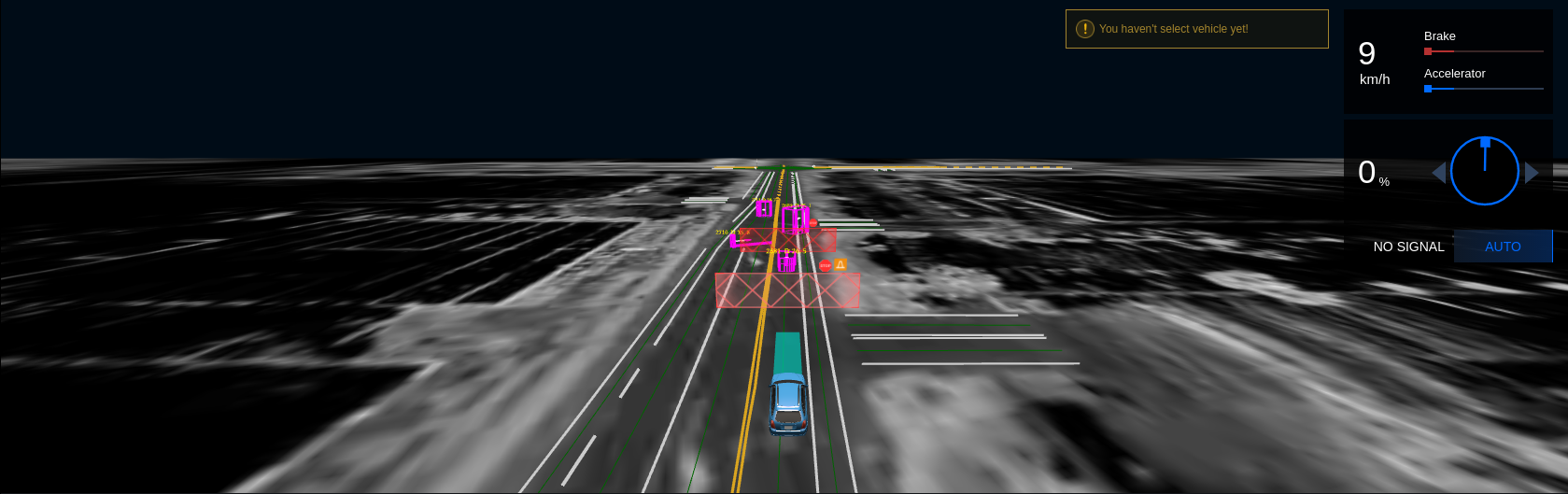
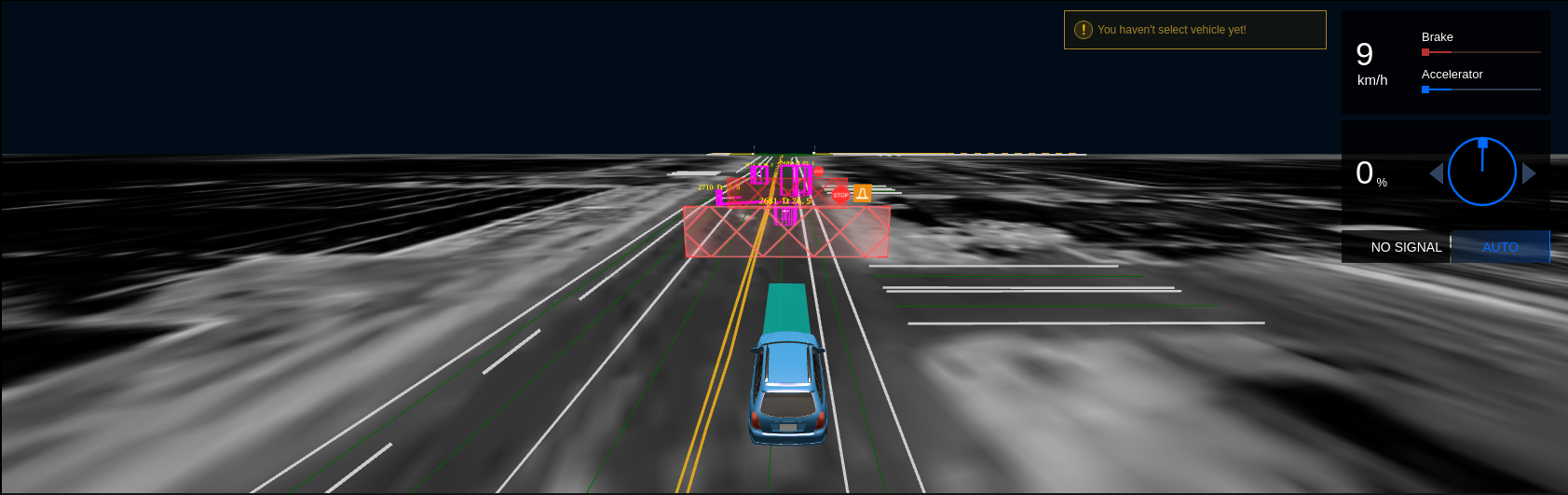
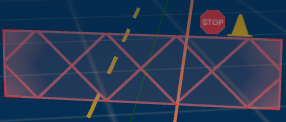
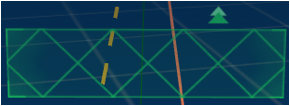
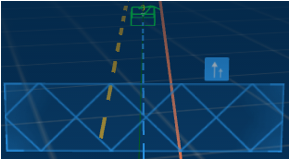
Planning决策¶
决策栅栏区¶
决策栅栏区显示了Planning模块对车辆障碍物做出的决策。每种类型的决策会表示为不同的颜色和图标,如下图所示:
Visual Element |
Depiction Explanation |
|---|---|
|
|
|
|
|
|
|
|
|
|

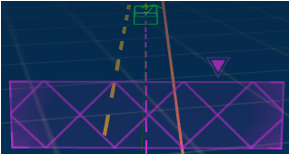
线路变更是一个特殊的决策,因此不显示决策栅栏区,而是将路线变更的图标显示在车辆上。
Visual Element |
Depiction Explanation |
|---|---|
|
|
|
|


在优先通行的规则下,当在交叉路口的停车标志处做出让行决策时,被让行的物体在头顶会显示让行图标
Visual Element |
Depiction Explanation |
|---|---|
|
停止标志处的让行物体 |

停止原因¶
如果显示了停止决策栅栏区,则停止原因展示在停止图标的右侧。可能的停止原因和对应的图标为:
Visual Element |
Depiction Explanation |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|











视图¶
可以在主视图中展示多种从Layer Menu选择的视图模式:
Visual Element |
Point of View |
|---|---|
|
|
|
|
|
|
|
地图
|