Apollo传感器集成说明¶
传感器上车集成前,请优先或同步完成工控机的Apollo系统安装,教程详见“循迹搭建——Apollo系统安装”。工控机安装Apollo系统时开采用自带的直流电源模块供电,显示器可使用电脑显示器。
快速介绍¶
请您在传感器集成前仔细阅读本文档。本文档介绍了传感器供电线束安装的注意事项。
Apollo上装电气原理图¶
Apollo上装电气原理图如下图所示:
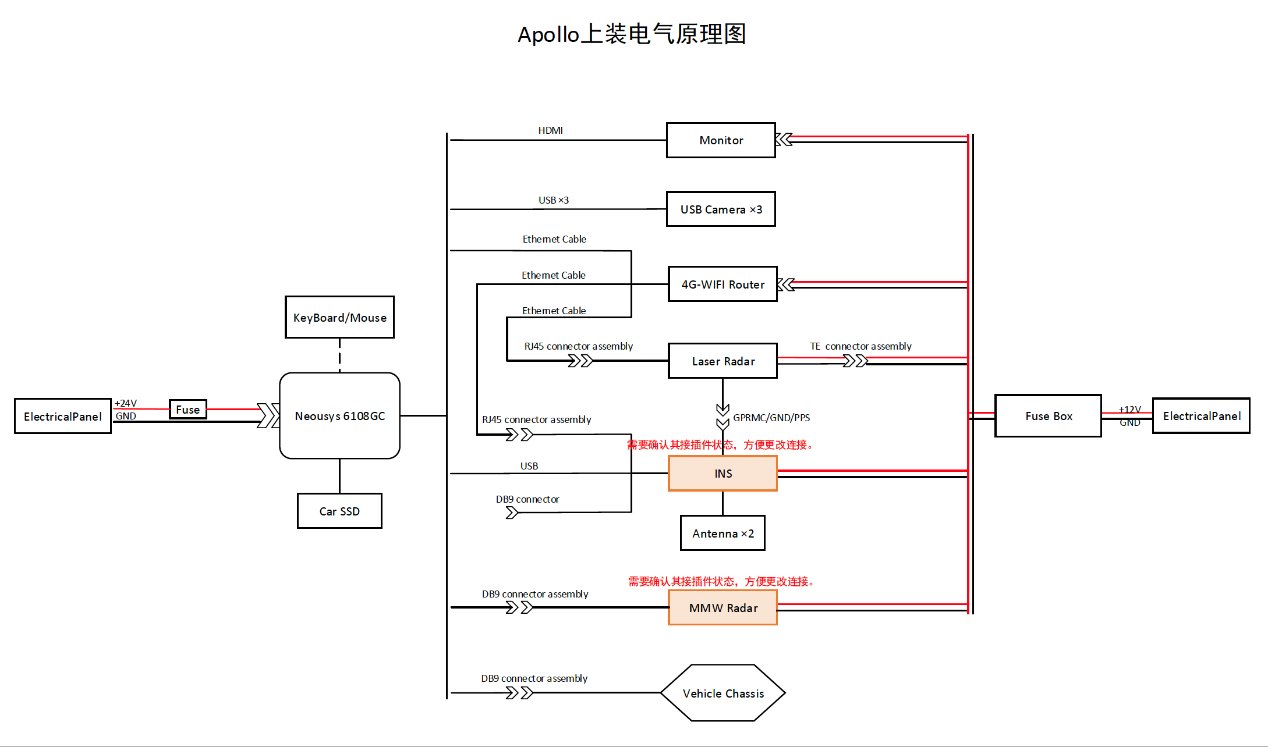
通过电气原理图可知,6108/8108工控机(IPC)由底盘独立提供24V电源,显示器、激光雷达、毫米波雷达、IMU和路由器则由底盘通过保险盒提供12V电源。
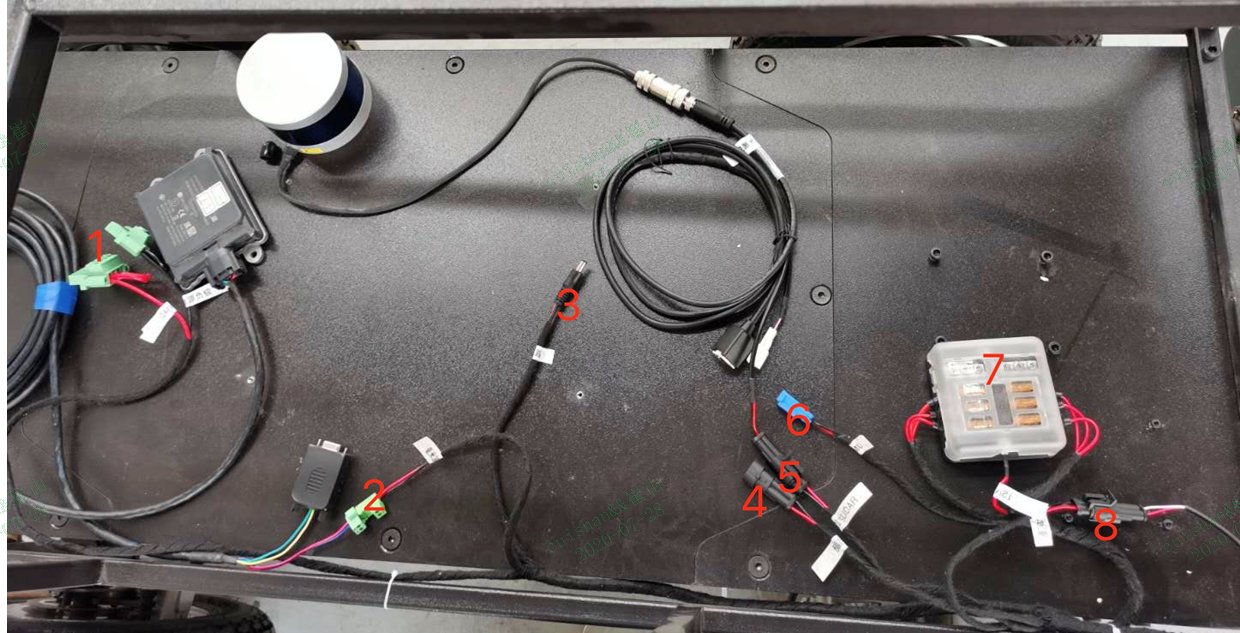
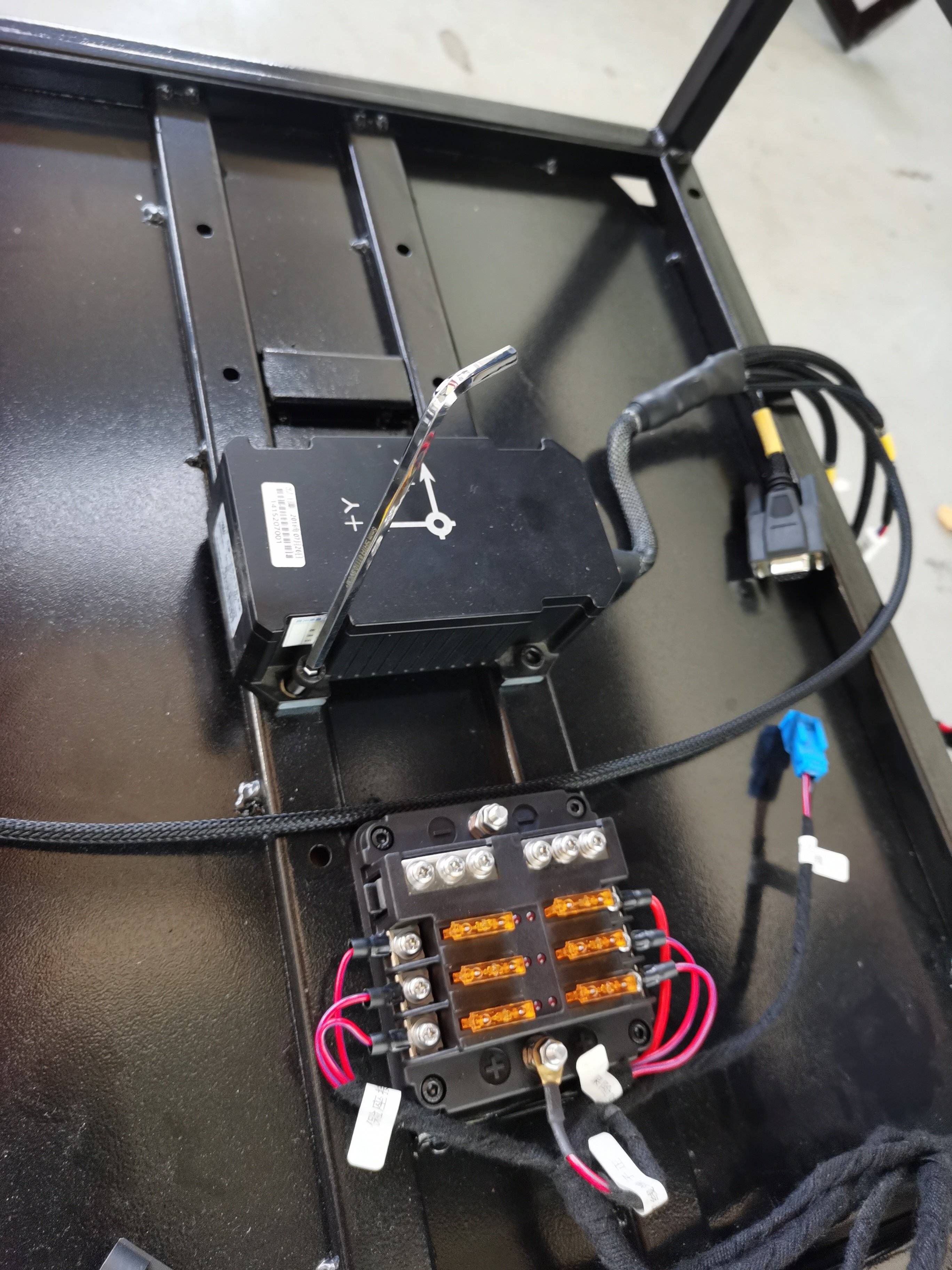
1. 上装传感器供电线束简介¶
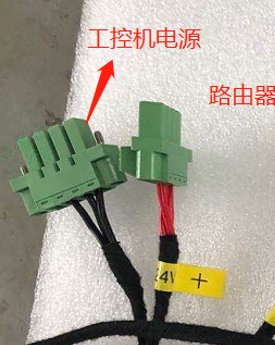
Apollo电气原理图中的供电部分集成在了一条供电线束中,如下图所示。
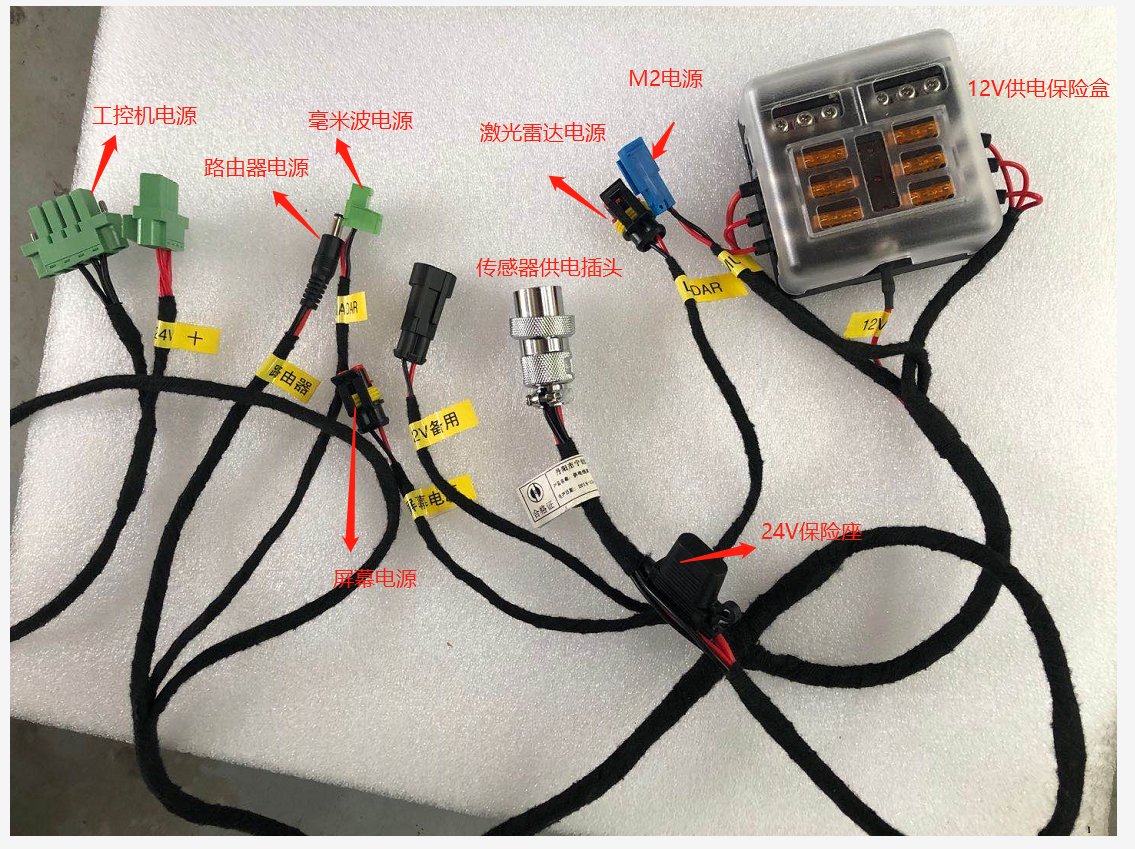
保险丝盒取消了负极接线,负极回路集成在线束内部。
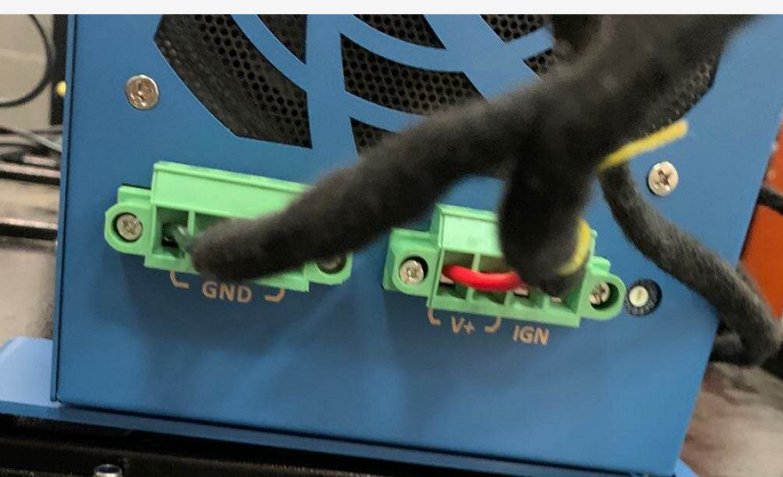
底盘后部电气面板如下图所示:
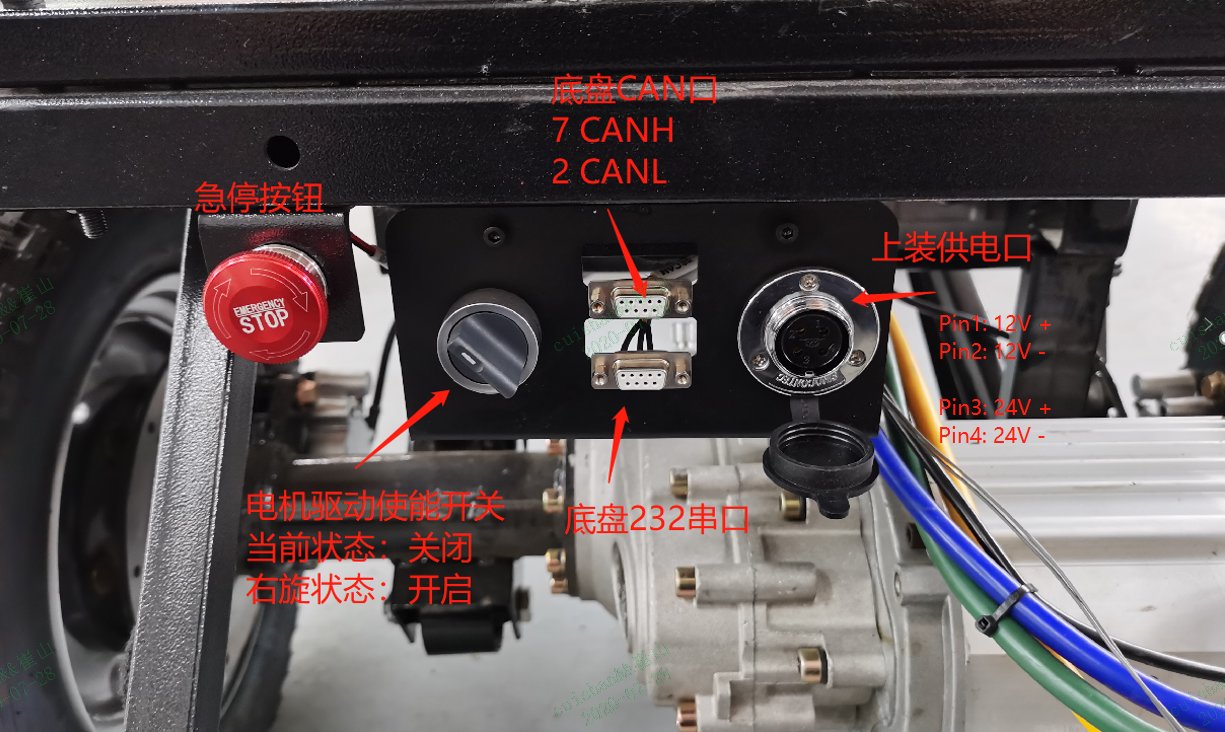
上装供电插座的脚位定义如图所示:1、Pin1—12V+;2、Pin2—12V-;3、Pin3—24V+;4、Pin4—24V-。

底盘can口通过db9延长线与工控机相连。上装供电线通过4pin航插与底盘供电插座相连。 提示:请在检查供电线束与传感器连接插头极性之后,再连接供电线束与底盘供电口的航插。
2. 传感器电源接口介绍¶
2、M2电源接口¶
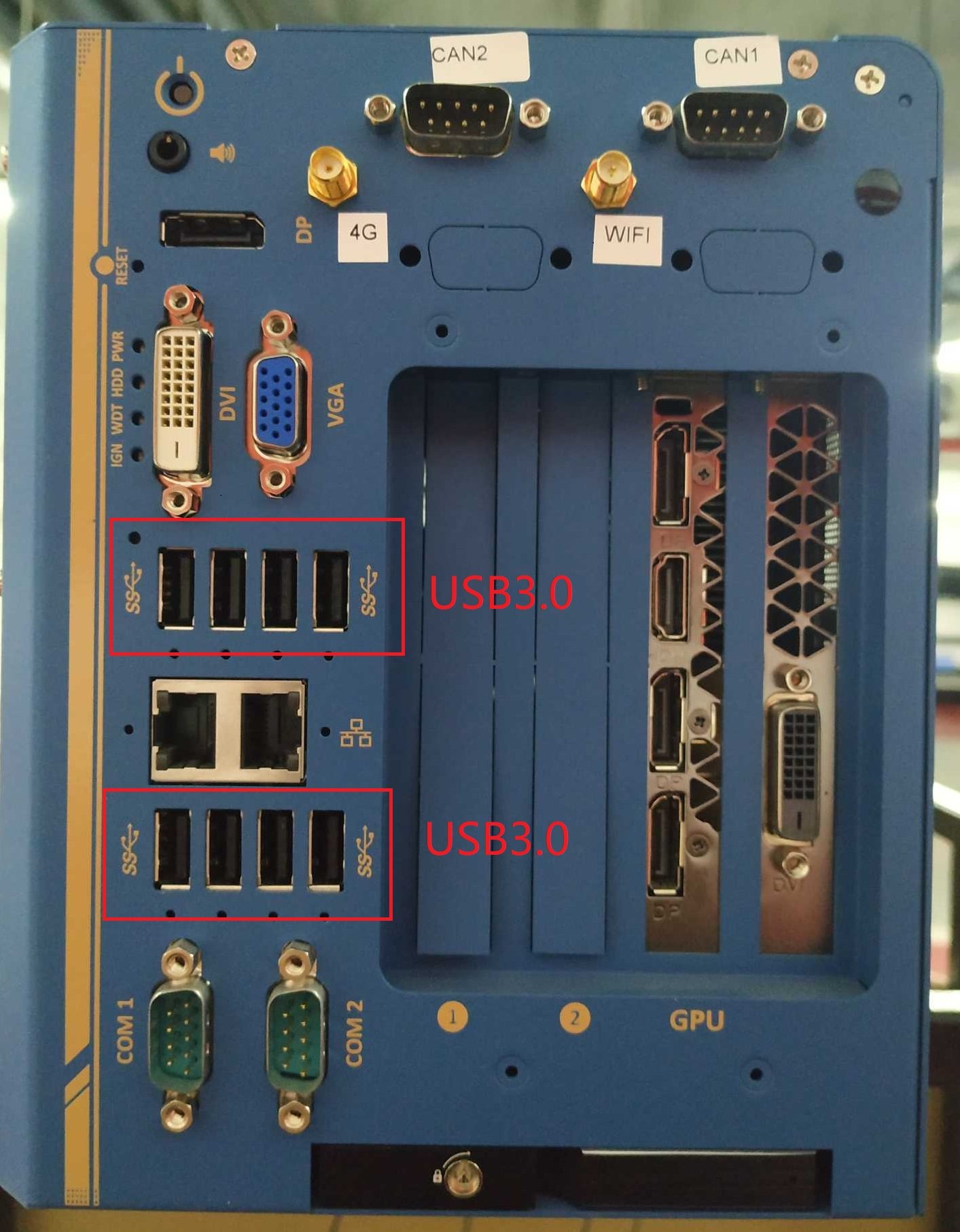
M2自带数据线缆为1分5线缆,一端为与工控机相连的航插接头,另一端为M2电源输入口,网口、激光雷达授时输出口,USB输出口,db9输出口(M2配置串口)。详细如下图所示:

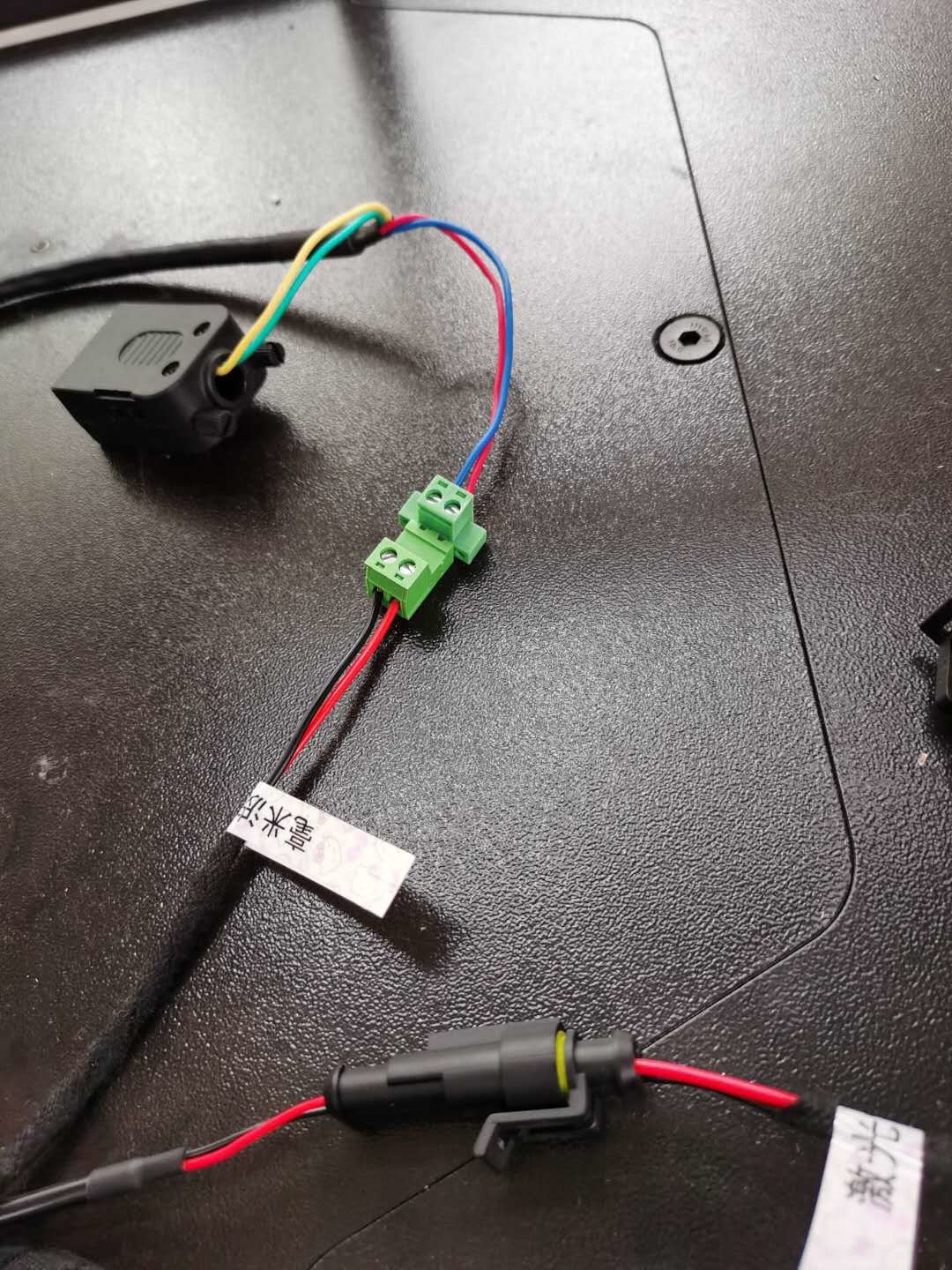
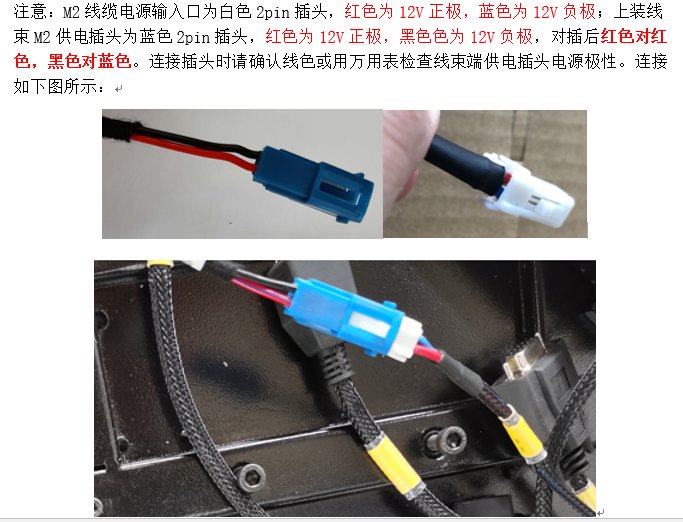
注意:M2线缆电源输入口为白色2pin插头,红色为12V正极,蓝色为12V负极;上装线束M2供电插头为蓝色2pin插头,红色为12V正极,黑色色为12V负极,对插后红色对红色,黑色对蓝色。连接插头时请确认线色或用万用表检查线束端供电插头电源极性。连接如下图所示:
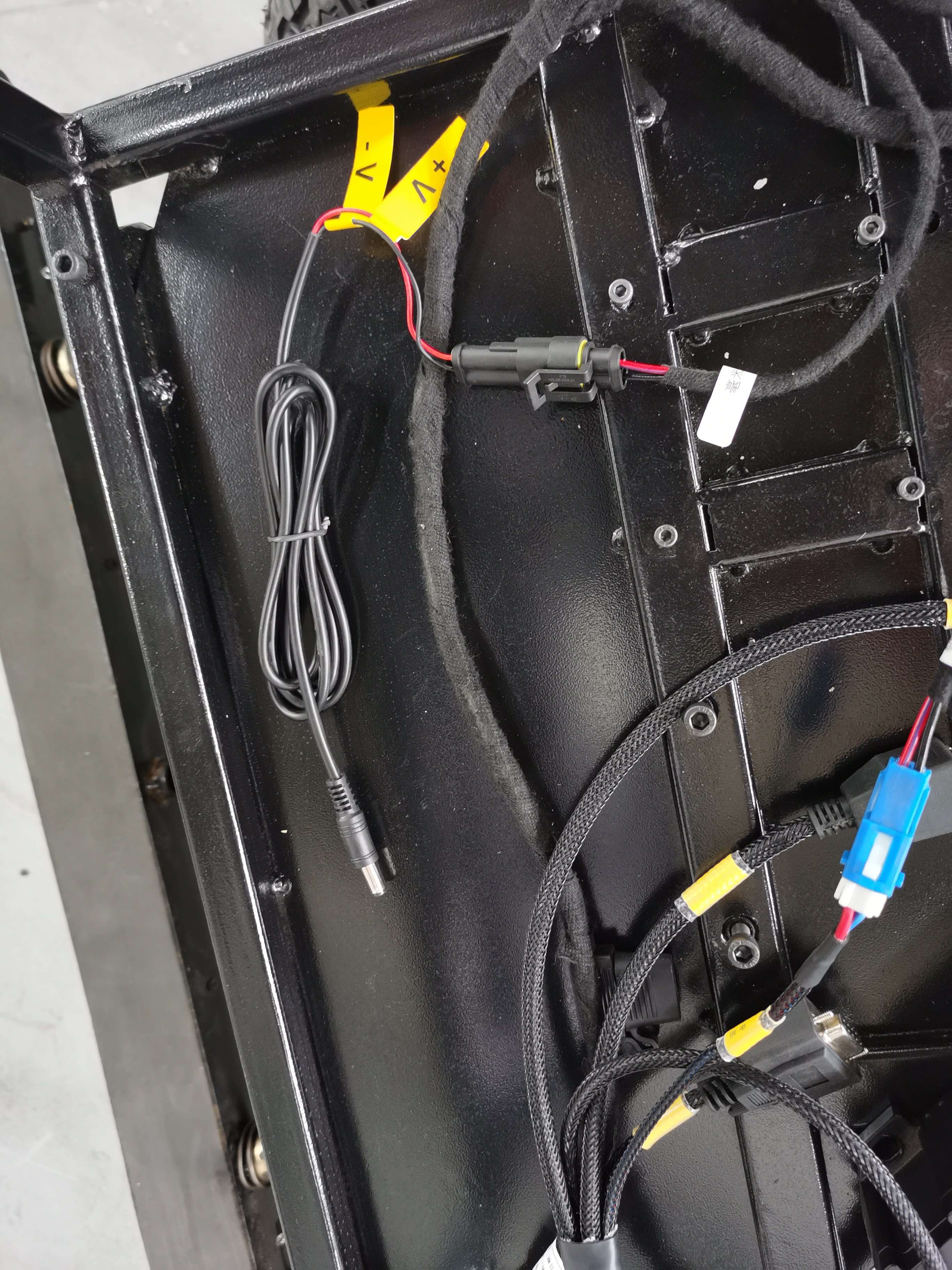
3、毫米波雷达电源接口¶
毫米波雷达线束,一端为毫米波雷达连接插头,另一端是电源插头2pin凤凰端子和CAN口。


注意:毫米波雷达线束电源插头:红色正+,蓝色负-;线束供电端为红色正+,黑色负-;再插接时,保证红对红,黑对蓝。