Velodyne HDL64E-S3安装指南¶
Apollo使用来自Velodyne LiDAR, Inc.的64线激光雷达系统 HDL-64E S3。

主要特性:¶
64频道
120米范围
每秒2.2百万点
360°水平视场
26.9°垂直视场
0.08°角分辨率(方位角)
精确度<2cm
~0.4°垂直分辨率
用户可选择的帧速率
坚固耐用的DesignLidar / Velodyne / HDL64E-S3 /
安装¶
HDL64E S3 LiDAR需要定制的结构才能安装在车辆顶部。该结构必须能为LiDAR系统提供刚性支撑,同时在驾驶条件下将LiDAR升高到地面以上的某个高度。该高度应保证来自LiDAR的激光束不被车辆的前部和/或后部阻挡。 LiDAR所需的实际高度取决于车辆的设计,并且LiDAR的安装点取决于所使用的车辆。激光器的垂直倾斜角通常在相对于地平线+2~-24.8度范围内。 对于标准的林肯MKZ,建议您将LiDAR安装在1.8米的最小高度(从地面到激光雷达底座),以便有效地使用角度范围进行探测。
如果由于某种原因,LiDAR光束必须被车辆阻挡,则在处理接收的数据时可能需要应用滤波器来移除这些点。
布线¶
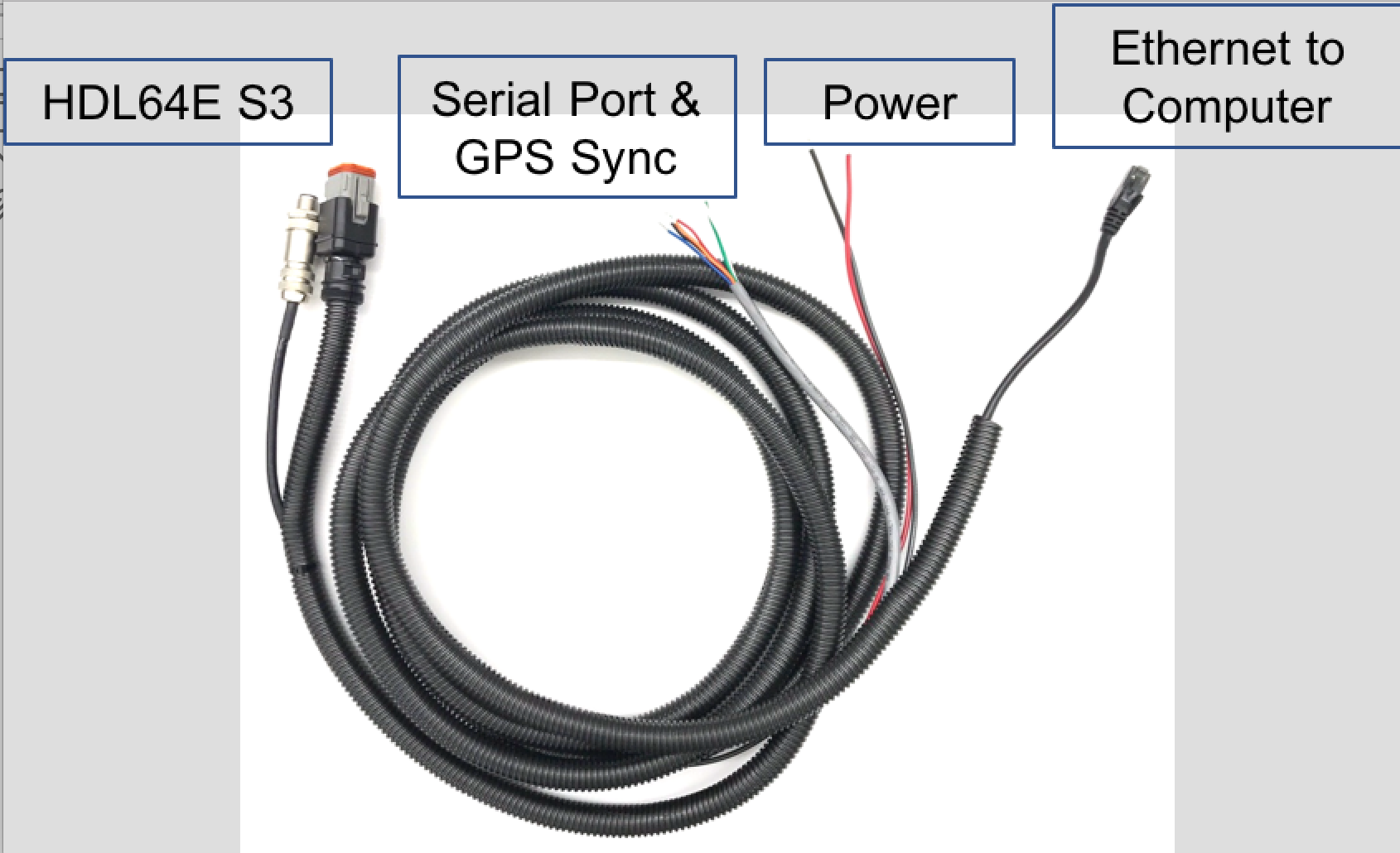
每个HDL-64E S3 LiDAR都包含一个电缆束,用于将LiDAR连接到电源、GPS时间同步源和计算机(用于数据传输的以太网和用于LiDAR配置的串行端口)。
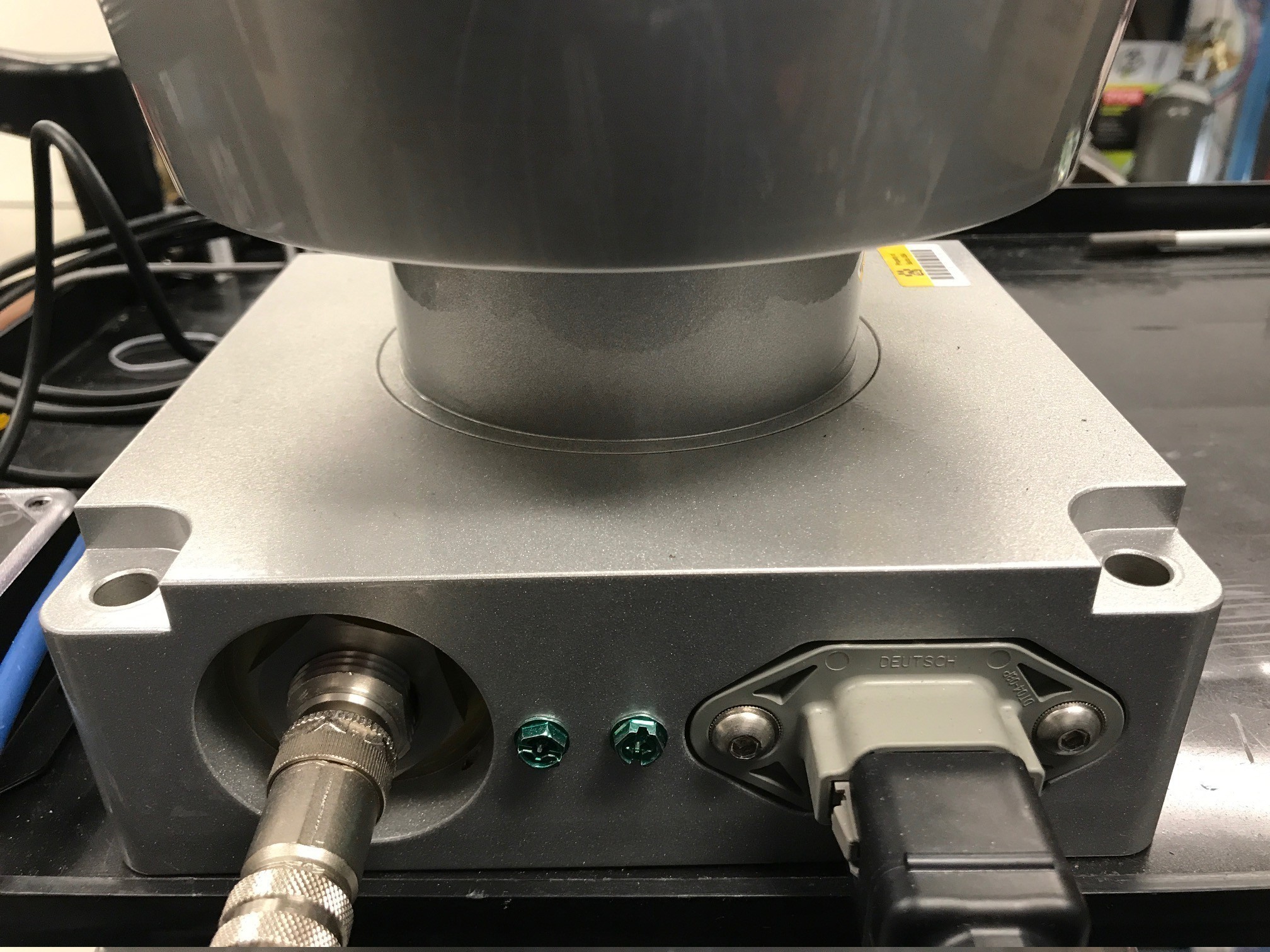
连接LiDAR
将电源线和信号线连接到LiDAR上的匹配端口
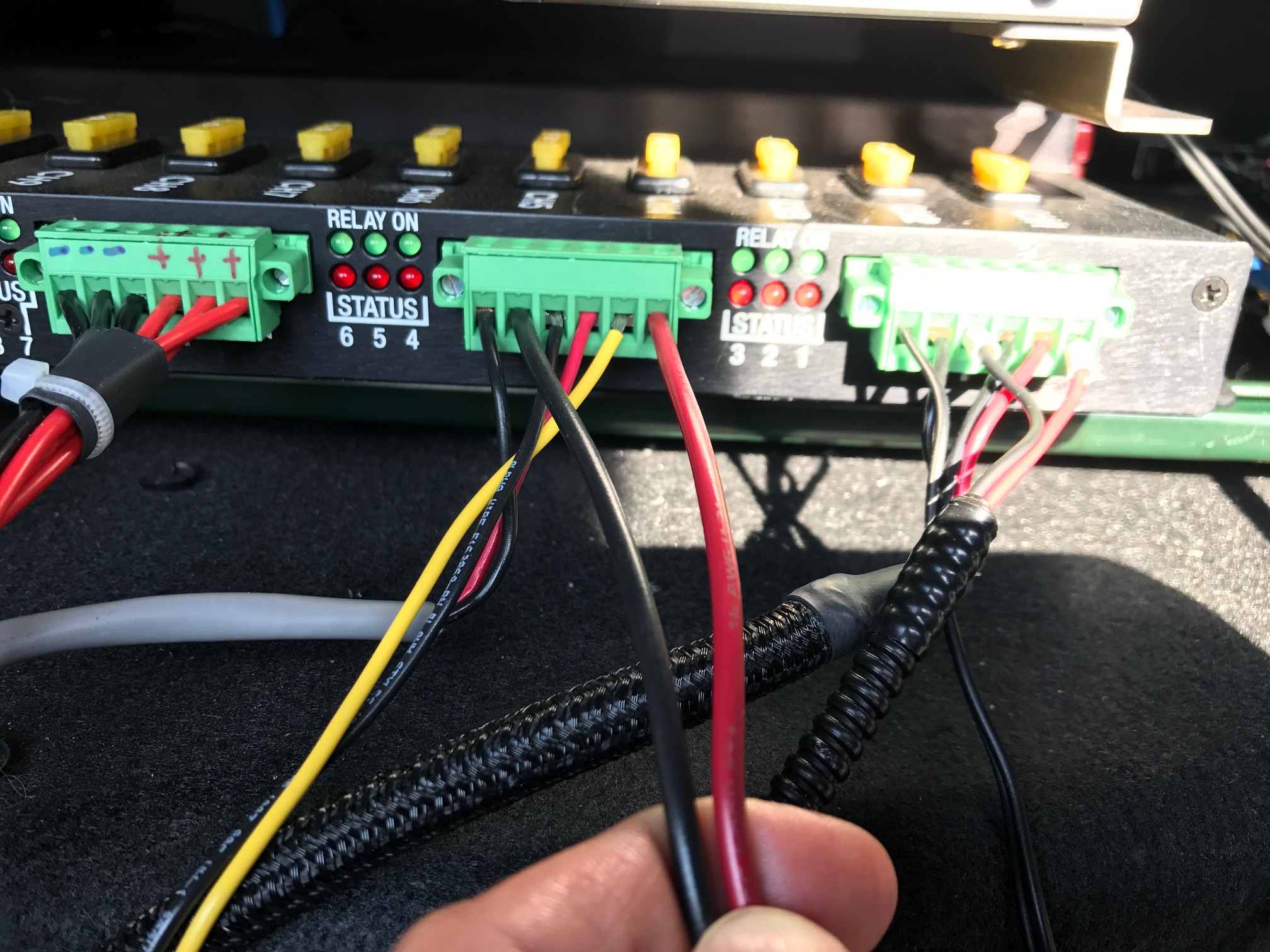
连接电源
两根AWG 16线用于为HDL-64E S3 LiDAR供电。 它需要大约3A的电流12V电压。连接电源时,请完全接触电线并拧紧螺钉。
连接IPC
与IPC的连接是通过以太网电缆进行的。将以太网连接器插入电缆束中,连接到IPC上的以太网端口。
连接GPS:
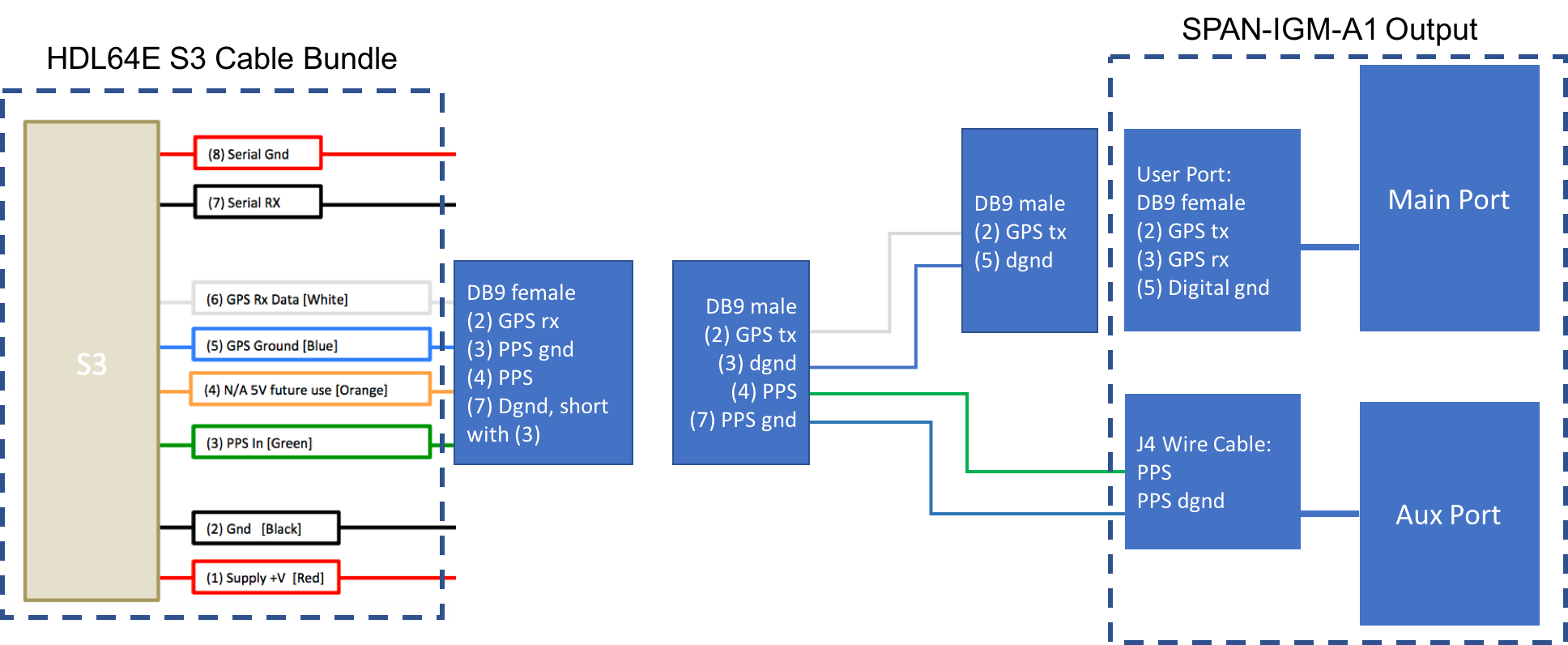
HDL64E S3 LiDAR需要建议的最小特定GPS /传输数据(GPRMC)和每秒脉冲数(PPS)信号才能与GPS时间同步。需要定制连接以建立GPS接收器和LiDAR之间的通信,如下所示:
SPAN-IGM-A1
如果您按照配置GPS和IMU中的说明配置了SPAN-IGM-A1,GPS接收器通过“用户端口”电缆发送GPRMC信号到“主要”端口。PPS信号通过标记为“PPS”和“PPS dgnd”的线缆从AUX端口发送。下图中的虚线框显示了HDL64E S3 LiDAR和SPAN-IGM-A1 GPS接收器的可用连接。其余连接必须由用户进行。
Propak 6 and IMU-IGM-A1
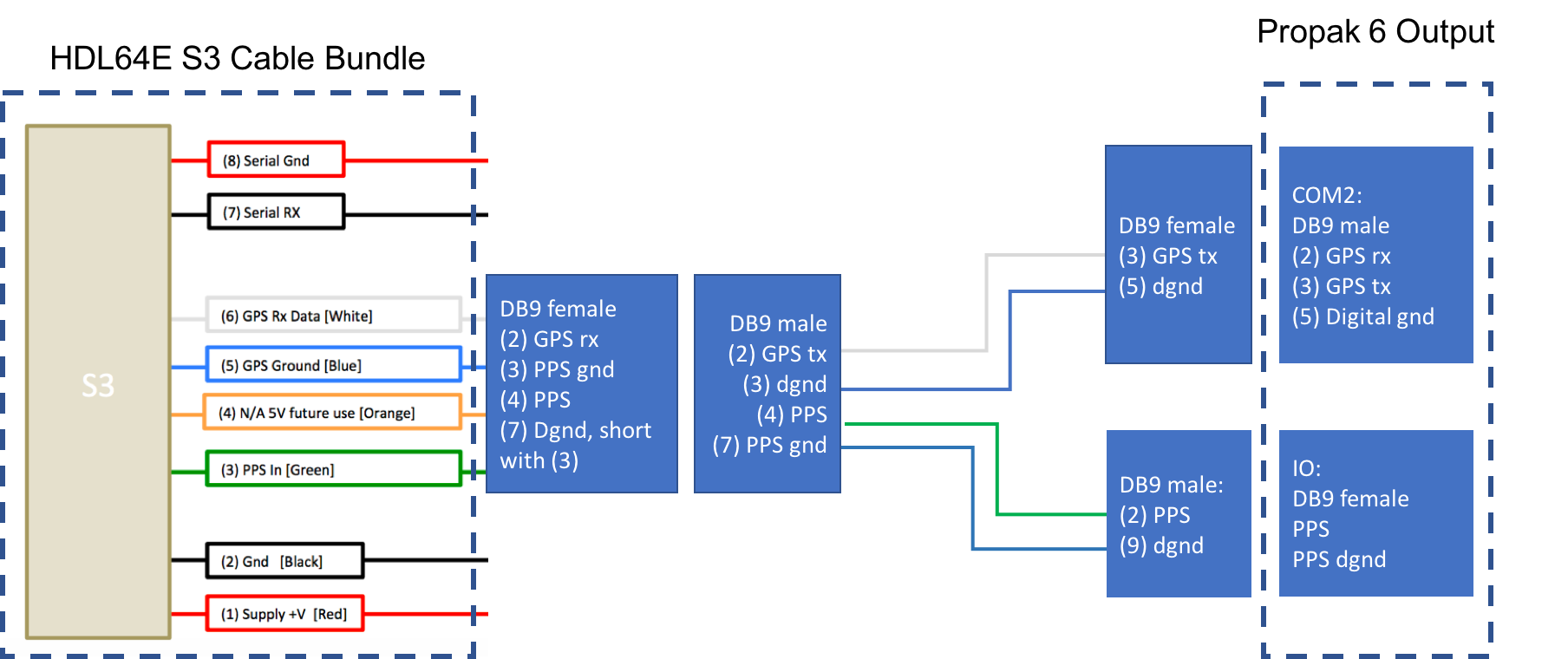
如果您按照配置GPS和IMU中的说明配置了Propak 6,GPS接收器通过COM2端口发送GPRMC信号。 PPS信号通过IO端口发送。 下图中的虚线框是HDL-64E S3 LiDAR和Propak 6 GPS接收器附带的可用连接。其余连接需要由用户进行。
通过串口连接计算机以进行LiDAR配置
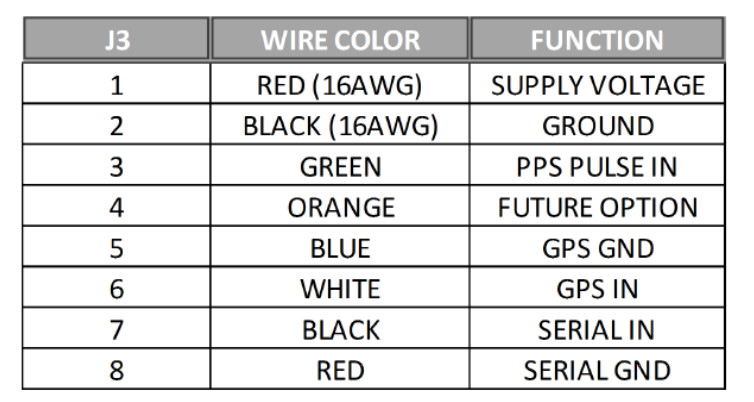
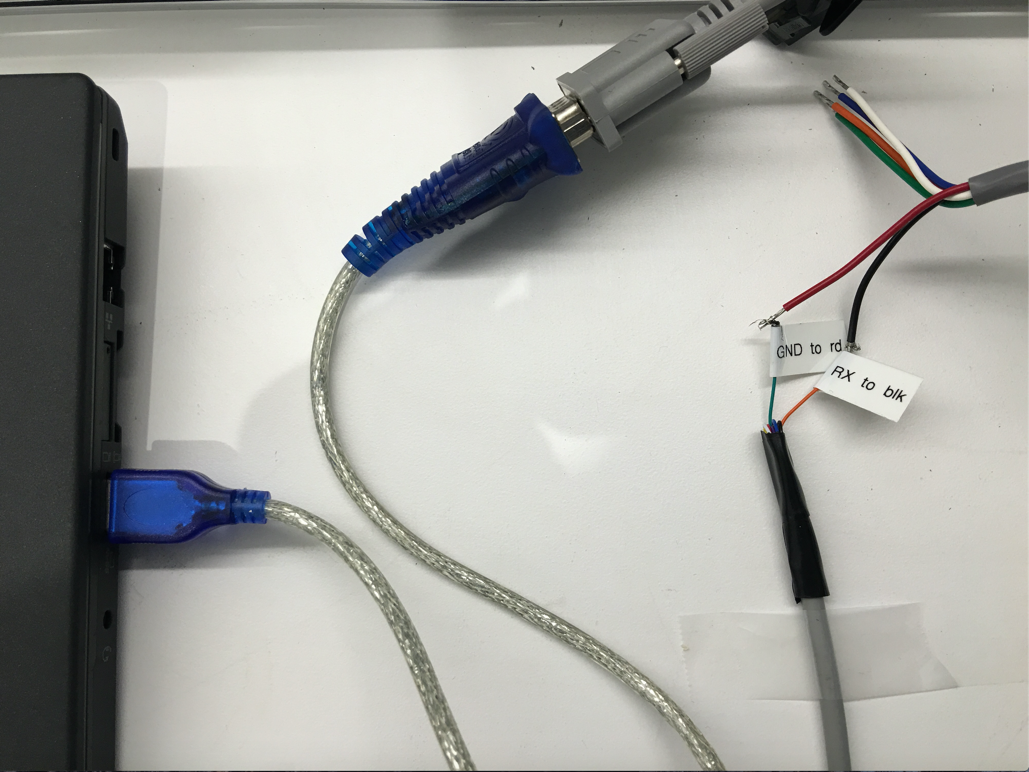
可通过串行端口配置一些低层参数。 在Velodyne LiDAR,Inc. 提供的电缆束中,有两对红/黑电缆,如下面的引脚表所示。较厚的一对(AWG 16)用于为LiDAR系统供电。较薄的一对用于串行连接。将黑线(串行输入)连接到RX,红线连接到串行电缆的地线。将串行电缆与USB串行适配器连接到所选计算机。
配置¶
默认情况下,HDL-64E S3的网络IP地址为192.168.0.1。 但是,在设置Apollo时,请将网络IP地址更改为 192.168.20.13 。 您可以将终端应用程序与Termite3.2一起使用。可以使用以下步骤配置HDL-64E S3的IP地址:
将串行电缆的一侧连接到笔记本电脑
将串行电缆的另一端连接到HDL-64E S3的串行线
使用以下默认COM端口设置:
- 波特率: 9600 - 奇偶校验: None - 数据位: 8 - 停止位: 1
使用COM端口应用程序:从以下链接下载Termite3.2并将其安装在您的笔记本电脑上(Windows) - 安装连接
使用HDL-64E S3和笔记本电脑之间COM端口的串行电缆连接:
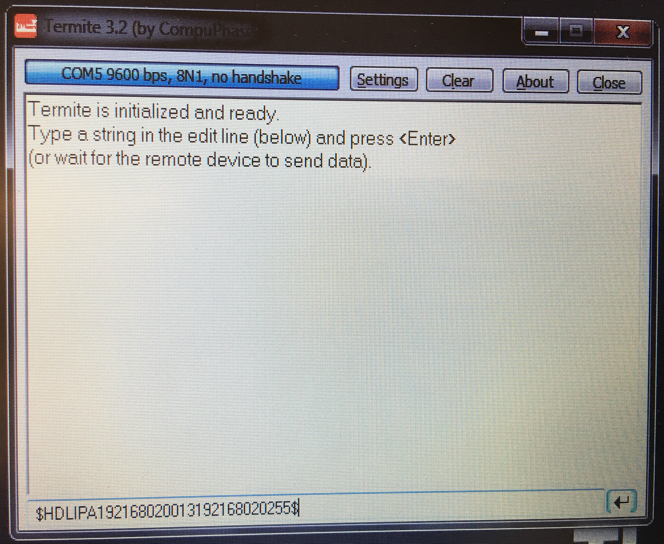
从笔记本电脑启动 Termite 3.2
发出串行命令,通过串口”#HDLIPA192168020013192168020255”设置HDL-64E S3的IP地址
重启设备以启用新的IP地址
免责声明¶
该设备由Apollo平台提供支持