Prediction模块分析¶
作用:¶
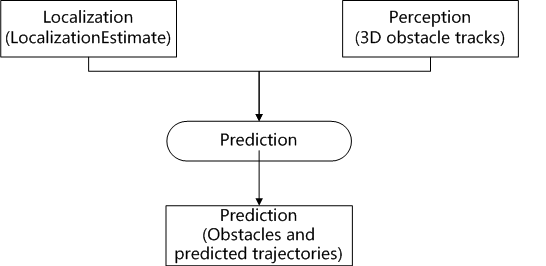
预测障碍物的运动轨迹,每条轨迹都有一个概率值。
输入:¶
车辆位置信息:/apollo/localization/pose([pb_msgs/LocalizationEstimate])。
障碍物信息:/apollo/perception/obstacles([pb_msgs/PerceptionObstacles])。
输出:¶
障碍物的运动轨迹。/apollo/prediction[pb_msgs/PredictionObstacle]。
节点图:¶
子模块:¶
容器: 存储订阅话题中的数据。
评估器:对于任意一个障碍物,评估器预测路径和速度。一个评估器通过使用_prediction/data/_ 下的评估模型对每条路径给出一个概率值,实现评估。
预测器:预测器为障碍物预测通过,当前通道包含以下几种:
车道序列:障碍物只能依据车道移动。
自由移动:障碍物自由移动。
区域引动:障碍物只能在一定的区域移动。
源码架构:¶
main.cc: 启动/prediction节点。
prediction.cc和prediction.h:
Name()函数:返回节点名字prediction。
Init()函数:
使用配置文件prediction_conf.pb.txt设置prediction_conf_,主要设置preditor的产生的通道类型。
使用配置文件adapter.conf设置adapter_conf_,设置节点话题类型。
初始化AdapterManager,定义nodehandle和话题。
初始化ContainerManager,每一个接受话题创建一个Container,用于接受话题数据。
初始化EvaluatorManager:注册一个Evaluator:MLP_EVALUATOR;根据prediction_conf.pb.txt配置MLP_EVALUATOR,似乎关注路上的车辆,设置vehicle_on_lane_evaluator_。
初始化PredictorManager:注册四个Predictor,并设置了vehicle_on_lane_predictor_,vehicle_off_lane_predictor_和pedestrian_predictor_。
检测localization和perception节点是否准备好。
设置localization和perception数据的回调函数OnLocalization和OnPerception。
OnLocalization函数:
获取障碍物容器obstacles_container。
获取位置pose_container。
将新到的位置消息存入pose_container。
更新障碍物信息。
OnPerception函数:
获取障碍物容器obstacles_container。
将新到的障碍物信息存入obstacles_container。
运行Evaluator。
运行Predictor。
跟新待发布数据prediction_obstacles header结构,发布消息。
评估器Evaluator:¶
创建一个新的NewEvaluator:
data/mlp_vehicle_model.bin:利用深度学习实现的评估器核心部分。
feature.proto或lane_graph.proto文件的配置输出,不清楚作用。
在evaluator/vehicle/目录下,以Evaluator为基类实现一个新的评估器类NewEvaluator。并参考mlp_evaluator实现类。
prediction_conf.pb.txt文件中指定所实现的新评估器类。
evaluator_manager.h中修改默认使用的评估器类。
evaluator_manager.cc中的Run()函数:
获取障碍物容器container。
遍历所有障碍物,利用障碍物id和障碍物容器获取障碍物信息obstacle。
针对lane上的障碍物,调用Evaluate进行评估。
mlp_evaluator.cc中的Evaluate()函数:
以单个障碍物为参数。计算单个障碍物的feature,并计算其概率。
每个obstacle_ptr中包含多个lane_graph_ptr。
利用obstacle_ptr和lane_graph_ptr可计算出feature_values
由feature_values计算概率值probability。
将概率值probability设置到lane_sequence_ptr。
进一步的分析需要理解feature和lane_sequence概念,需要进入算法,暂时评估器到这里。
预测器Predictor:¶
功能:预测障碍物的未来轨迹。
创建一个新的预测器NewPredictor:
在predictor/下新建目录vehicle。
在vehicle目录下创建new_predictor.h和new_predictor.cc,主要是继承与Predictor类定义并实现子类NewPredictor。具体实现可以参考vehicle同级目录free_move等。
更新配置文件prediction_conf.pb.txt,添加新预测器类型。
更新manager,在文件predictor_manager.h中修改默认预测器类型。
prediction_manager.cc中的run()函数:
获取障碍物容器container。
设置预测障碍物的时间戳。
根据预测障碍物中的id和容器获取障碍物信息obstacle。
根据预测障碍物中的类型设置预测器的类型predictor。
传入障碍物信息,执行预测器predictor->Predict(obstacle)。
将障碍物的所有轨道配置到预测到的障碍物中。并更新时间戳。
预测器函数Predict()函数:
根据障碍物信息获取feature。
由feature获取num_lane_sequence。
遍历num_lane_sequence,通过feature获取sequence。
由sequence获取curr_lane_id。
由curr_lane_id通过DrawLaneSequenceTrajectoryPoints()函数获取TrajectoryPoint。
由TrajectoryPoint通过GenerateTrajectory()函数获取trajectory。
设置该trajectory的probability,存入trajectories_向量。
和Evaluator类似,进一步分析需了解具体算法,暂时到这里。