gym-multigrid 简介#
gym-multigrid 旨在提供轻量级、多智能体的网格环境。它最初基于这个多网格环境,但自那以后进行了大量修改和开发,超出了原始环境的范围。
可以直接安装 gym-multigrid:
pip install gym-multigrid
亦可克隆到本地:
git clone https://github.com/Tran-Research-Group/gym-multigrid.git
import sys
from pathlib import Path
from IPython import display
root_dir = Path(".").resolve()
sys.path.extend([str(root_dir.parents[2]/"tests/gym-multigrid")])
temp_dir = root_dir/"images"
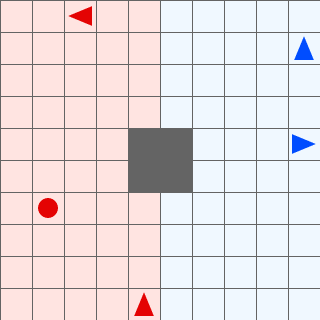
gym-multigrid Capture-the-Flag (CtF) 环境#
import numpy as np
import imageio
from gym_multigrid.envs.ctf import Ctf1v1Env, CtFMvNEnv
from gym_multigrid.policy.ctf.heuristic import (
FightPolicy,
CapturePolicy,
PatrolPolicy,
RwPolicy,
PatrolFightPolicy,
)
from gym_multigrid.utils.map import load_text_map
import matplotlib.pyplot as plt
简单测试:
map_path: str = root_dir/"tests/assets/board.txt"
env = Ctf1v1Env(
map_path=map_path, render_mode="human", observation_option="flattened"
)
obs, _ = env.reset()
env.render()
while True:
action = np.random.choice(list(env.actions_set))
obs, reward, terminated, truncated, info = env.step(action)
env.render()
if terminated or truncated:
break
设置随机种子:
# TODO: might be good idea to include seeding test for other environments
def test_ctf_random_seeding(root_dir) -> None:
map_path: str = f"{root_dir}/tests/assets/board.txt"
env = Ctf1v1Env(
map_path=map_path, render_mode="human", observation_option="flattened"
)
env.reset(seed=1)
array1 = env.np_random.random(10)
env.reset(seed=1)
array2 = env.np_random.random(10)
np.testing.assert_allclose(array1, array2)
test_ctf_random_seeding(root_dir)
MvN CtF:
def test_ctf_mvn_human(root_dir) -> None:
map_path: str = f"{root_dir}/tests/assets/board.txt"
env = CtFMvNEnv(
num_blue_agents=2,
num_red_agents=2,
map_path=map_path,
render_mode="human",
observation_option="flattened",
)
obs, _ = env.reset()
env.render()
while True:
action = env.action_space.sample()
obs, reward, terminated, truncated, info = env.step(action)
env.render()
if terminated or truncated:
break
assert terminated or truncated
test_ctf_mvn_human(root_dir)
def test_ctf_mvn_rgb(root_dir, temp_dir) -> None:
map_path: str = f"{root_dir}/tests/assets/board.txt"
env = CtFMvNEnv(
num_blue_agents=2,
num_red_agents=2,
map_path=map_path,
render_mode="rgb_array",
observation_option="flattened",
)
obs, _ = env.reset()
frames = [env.render()]
while True:
action = env.action_space.sample()
obs, reward, terminated, truncated, info = env.step(action)
frames.append(env.render())
if terminated or truncated:
break
temp_dir = Path(temp_dir)
(temp_dir/"animations").mkdir(exist_ok=True)
imageio.mimsave(temp_dir/f"animations/ctf_mvn.gif", frames, duration=0.5)
assert Path(temp_dir/f"animations/ctf_mvn.gif").exists()
test_ctf_mvn_rgb(root_dir, temp_dir)
display.Image(temp_dir/f"animations/ctf_mvn.gif")
def test_fight_policy(root_dir, temp_dir) -> None:
(temp_dir/"animations").mkdir(exist_ok=True)
animation_path = temp_dir/"animations/ctf_mvn_fight_policy.gif"
map_path = f"{root_dir}/tests/assets/board.txt"
_field_map = load_text_map(map_path)
enemy_policy = FightPolicy()
env = CtFMvNEnv(
num_blue_agents=2,
num_red_agents=2,
map_path=map_path,
render_mode="human",
observation_option="flattened",
enemy_policies=[enemy_policy, RwPolicy()],
)
obs, _ = env.reset()
frames = [env.render()]
while True:
action = env.action_space.sample()
obs, reward, terminated, truncated, info = env.step(action)
frames.append(env.render())
if terminated or truncated:
break
imageio.mimsave(animation_path, frames, duration=0.5)
assert animation_path.exists()
test_fight_policy(root_dir, temp_dir)
display.Image(temp_dir/"animations/ctf_mvn_fight_policy.gif")
def test_capture_policy(map_path, animation_path) -> None:
field_map = load_text_map(map_path)
enemy_policy = CapturePolicy(field_map)
env = CtFMvNEnv(
num_blue_agents=2,
num_red_agents=2,
map_path=map_path,
render_mode="human",
observation_option="flattened",
enemy_policies=[enemy_policy, RwPolicy()],
)
obs, _ = env.reset()
frames = [env.render()]
while True:
action = env.action_space.sample()
obs, reward, terminated, truncated, info = env.step(action)
frames.append(env.render())
if terminated or truncated:
break
imageio.mimsave(animation_path, frames, duration=0.5)
assert Path(animation_path).exists
animation_path: str = f"{temp_dir}/animations/ctf_mvn_capture_policy.gif"
map_path: str = f"{root_dir}/tests/assets/board.txt"
test_capture_policy(map_path, animation_path)
display.Image(f"{temp_dir}/animations/ctf_mvn_capture_policy.gif")
def test_patrol_policy(animation_path, map_path) -> None:
field_map = load_text_map(map_path)
enemy_policy = PatrolPolicy(field_map)
env = CtFMvNEnv(
num_blue_agents=2,
num_red_agents=2,
map_path=map_path,
render_mode="human",
observation_option="flattened",
enemy_policies=enemy_policy,
)
obs, _ = env.reset()
frames = [env.render()]
while True:
action = env.action_space.sample()
obs, reward, terminated, truncated, info = env.step(action)
frames.append(env.render())
if terminated or truncated:
break
imageio.mimsave(animation_path, frames, duration=0.5)
assert Path(animation_path).exists
animation_path: str = f"{temp_dir}/animations/ctf_mvn_patrol_policy.gif"
map_path: str = f"{root_dir}/tests/assets/board.txt"
test_patrol_policy(animation_path, map_path)
display.Image(f"{temp_dir}/animations/ctf_mvn_patrol_policy.gif")
def test_patrol_fight_policy(map_path, animation_path) -> None:
field_map = load_text_map(map_path)
enemy_policy = PatrolFightPolicy(field_map)
env = CtFMvNEnv(
num_blue_agents=2,
num_red_agents=2,
map_path=map_path,
render_mode="human",
observation_option="flattened",
enemy_policies=enemy_policy,
)
obs, _ = env.reset()
frames = [env.render()]
while True:
action = env.action_space.sample()
obs, reward, terminated, truncated, info = env.step(action)
frames.append(env.render())
if terminated or truncated:
break
imageio.mimsave(animation_path, frames, duration=0.5)
assert Path(animation_path).exists
animation_path: str = f"{temp_dir}/animations/ctf_mvn_patrol_fight_policy.gif"
map_path: str = f"{root_dir}/tests/assets/board.txt"
test_patrol_fight_policy(map_path, animation_path)
display.Image(f"{temp_dir}/animations/ctf_mvn_patrol_fight_policy.gif")
def test_mvn_ctf_render(map_path, img_save_path) -> None:
env = CtFMvNEnv(
num_blue_agents=2,
num_red_agents=2,
map_path=map_path,
render_mode="human",
observation_option="flattened",
)
obs, _ = env.reset()
for _ in range(1):
action = env.action_space.sample()
obs, reward, terminated, truncated, info = env.step(action)
img = env.render()
plt.imsave(img_save_path, img, dpi=600)
assert Path(img_save_path).exists
(temp_dir/"plots").mkdir(parents=True, exist_ok=True)
img_save_path: str = f"{temp_dir}/plots/mvn_ctf_render.png"
map_path: str = f"{root_dir}/tests/assets/board.txt"
test_mvn_ctf_render(map_path, img_save_path)
display.Image(f"{temp_dir}/plots/mvn_ctf_render.png")
Maze 环境#
from gym_multigrid.envs.maze import MazeSingleAgentEnv
map_path: str = f"{root_dir}/tests/assets/board_maze.txt"
env = MazeSingleAgentEnv(
map_path=map_path, render_mode="human", max_steps=200, step_penalty_ratio=0
)
obs, _ = env.reset()
env.render()
while True:
action = np.random.choice(list(env.actions_set))
obs, reward, terminated, truncated, info = env.step(action)
env.render()
if terminated or truncated:
break
Collect 游戏#
Attribute |
Description |
|---|---|
Action Space |
|
Observation Space |
|
Observation Encoding |
|
Reward |
|
Number of Agents |
|
Termination Condition |
|
Truncation Steps |
|
Creation |
|
代理在网格中移动以收集物体。物体在被收集后会在随机位置重新生成。
import gymnasium as gym
from gym_multigrid.envs.collect_game import CollectGameEnv
kwargs={
"size": 10,
"num_balls": [15,],
"agents_index": [3, 5], # green, purple
"balls_index": [0, 1, 2], # red, orange, yellow
"balls_reward": [1, 1, 1],
"respawn": False,
}
env = CollectGameEnv(**kwargs)
frames = [env.render()]
obs, info = env.reset()
while True:
actions = [env.action_space.sample() for a in env.agents]
obs, reward, terminated, truncated, info = env.step(actions)
frames.append(env.render())
if terminated or truncated:
print(f"episode ended after {env.step_count} steps")
print(f"agents collected {env.collected_balls} objects")
break
temp_dir = Path(temp_dir)
(temp_dir/"animations").mkdir(parents=True, exist_ok=True)
imageio.mimsave(temp_dir/f"animations/multigrid-collect.gif", frames, duration=0.5)
display.Image(temp_dir/f"animations/multigrid-collect.gif")