
Apollo 3.0传感器安装指南¶
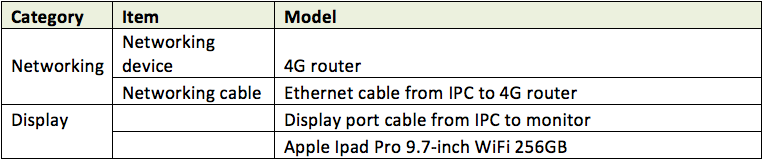
需要的硬件¶
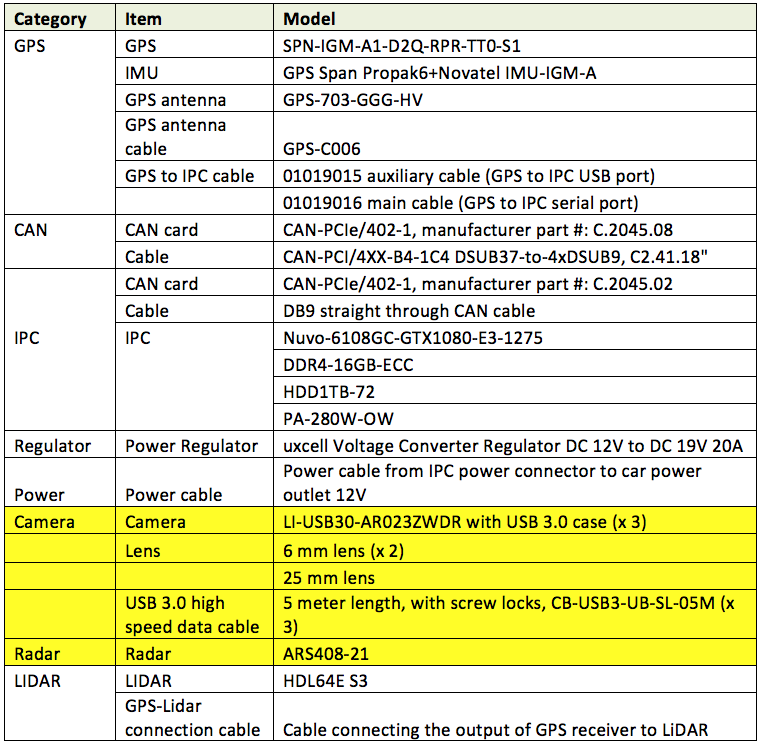
外部设备
坐标系¶
单位:毫米(mm)
原点:车辆后轮轴中心
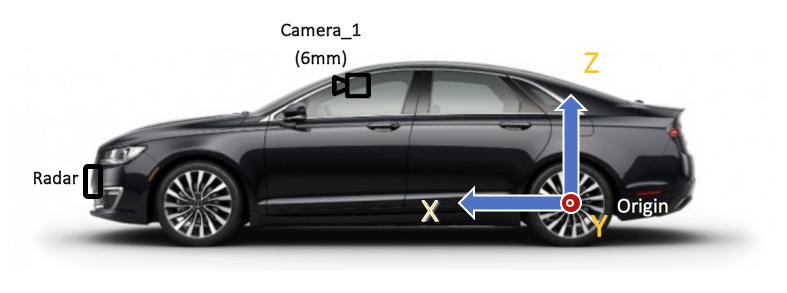
Figure 1. 原点和坐标系

Figure 2. 卡车坐标系和安装摄像机与雷达的示意图
传感器安装指南¶
IMU/GPS¶
IMU/GPS需要安装在靠近后车轮毂的位置。GPS天线需要安装在车辆顶部。
Radar¶
远程雷达需要安装在车辆前保险杠上,请参考Figure 1 and Figure 2展示的信息。
Camera¶
一个6mm镜头的摄像机应该面向车辆的前方。前向摄像机应当安装在车辆前部的中心位置,离地面高度为1600mm到2000mm(Camera 1),或者安装在车辆挡风玻璃上(Camera 2)。
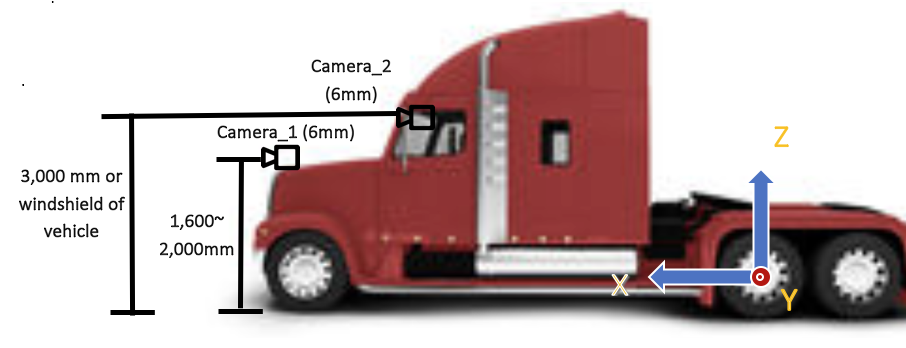
Figure 3. 安装摄像机的示例图
摄像机安装完成后,摄像机w、r、t的物理坐标x、y、z应该被记录在校准文件里。
安装摄像机后的检验¶
三个摄像机的方位应当全部设置为0。摄像机安装后,需要车辆在公路以直线开动一段距离并记录一个rosbag,通过rosbag的回放,摄像机的方位需要重新调整以设置间距、偏航角并将角度转置为0度。如果摄像机被正确的安装,地平线应该在画面高度方向上的正中间并且不倾斜。灭点同样应该在画面的正中间。请参考下述图片以将摄像机设置为最佳状态:

Figure 4. 摄像机安装后的画面示例。地平线应该在画面高度方向上的正中间并且不倾斜。灭点同样应该在画面的正中间。 红色线段显示了画面高度和宽度方向上的中点。
估测的平移参数的示例如下所示:
header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: white_mkz
child_frame_id: onsemi_obstacle
transform:
rotation:
x: 0.5
y: -0.5
z: 0.5
w: -0.5
translation:
x: 1.895
y: -0.235
z: 1.256
如果角度不为0,则上述数据需要重新校准并在四元数中表示(参考上例中的transform->rotation )