
Apollo 6.0 快速入门指南¶
以下指南是用于在车辆上启动Apollo软硬件套件的用户手册, 整体内容与Apollo 5.5类似。本快速入门指南重点介绍新功能,对于 Apollo 的一般概念,请参阅Apollo 5.5 快速入门指南
内容¶
紧急车辆音频检测¶
Apollo目前通过音频设备集成了紧急车辆检测功能。在自动驾驶车辆上安装麦克风采集周围的音频信号,并对记录的音频进行分析和处理,以检测周围的紧急车辆。模块详细信息在这里。
Apollo集成了新的深度学习模型,包括使用PointPillars进行障碍物检测、使用语义地图进行行人预测以及基于学习的轨迹规划。请在对应的模块中寻找详细的信息。
硬件和软件安装¶
Apollo 6.0的硬件设置与Apollo 3.5相同,请参阅Apollo 3.5 硬件与系统安装指南获取安装硬件组件的步骤,参阅Apollo软件安装指南获取软件安装步骤。
Dreamview的使用¶
关于Dreamview图标的问题,请参考Dreamview用法介绍。关于Dreamland和场景编辑器的问题,请参考Dreamland简介。
上车测试¶
将一个外部磁盘驱动器接入主机任一可用USB接口。
首先启动车辆,然后启动主机。
启动Dev版本的Docker容器。
启动Dreamview。
打开浏览器(譬如Chrome)然后在地址栏输入 http://localhost:8888
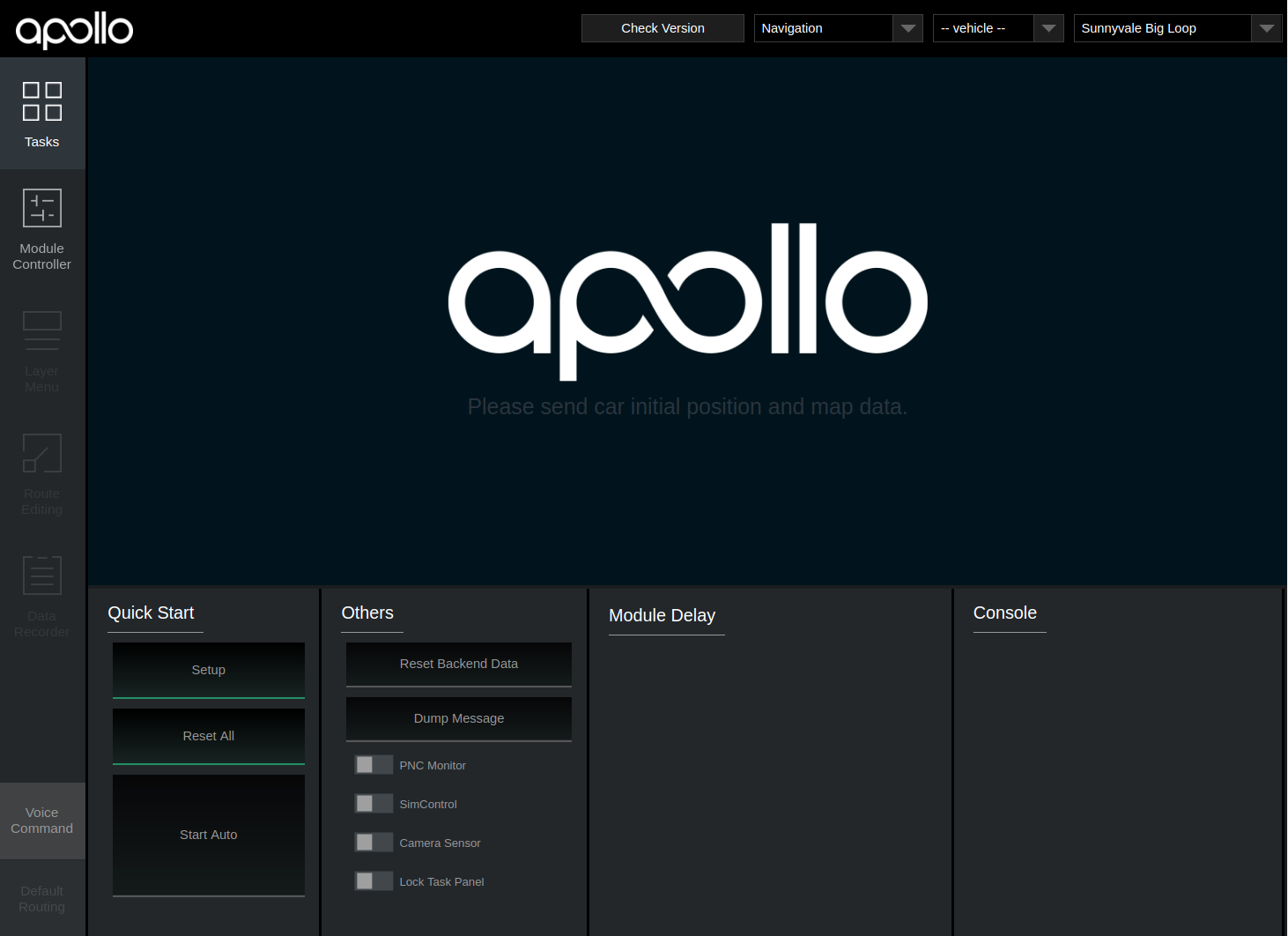
选择模式、车辆和地图。
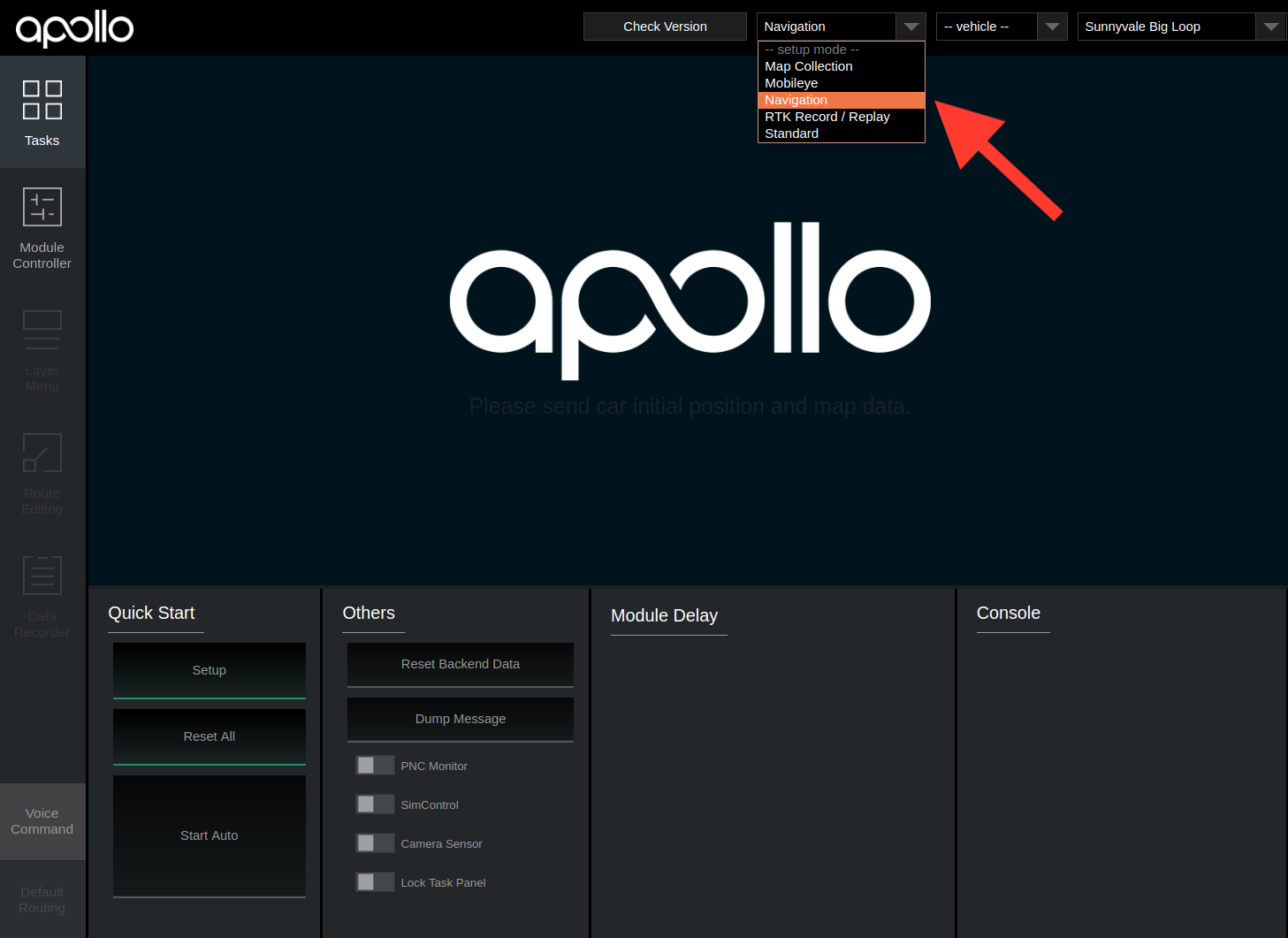
附注: 在进行任何测试前会要求使用者设置参数。点击下拉列表并选择想要使用的导航模式,高清地图和车辆。该列表数据在HMI配置文件目录中定义。
附注: 允许使用者在HMI的右侧面板中更改参数,但是需要点击右上角的
Reset All按钮重启该系统以使参数生效。启动模块。
点击
Setup按钮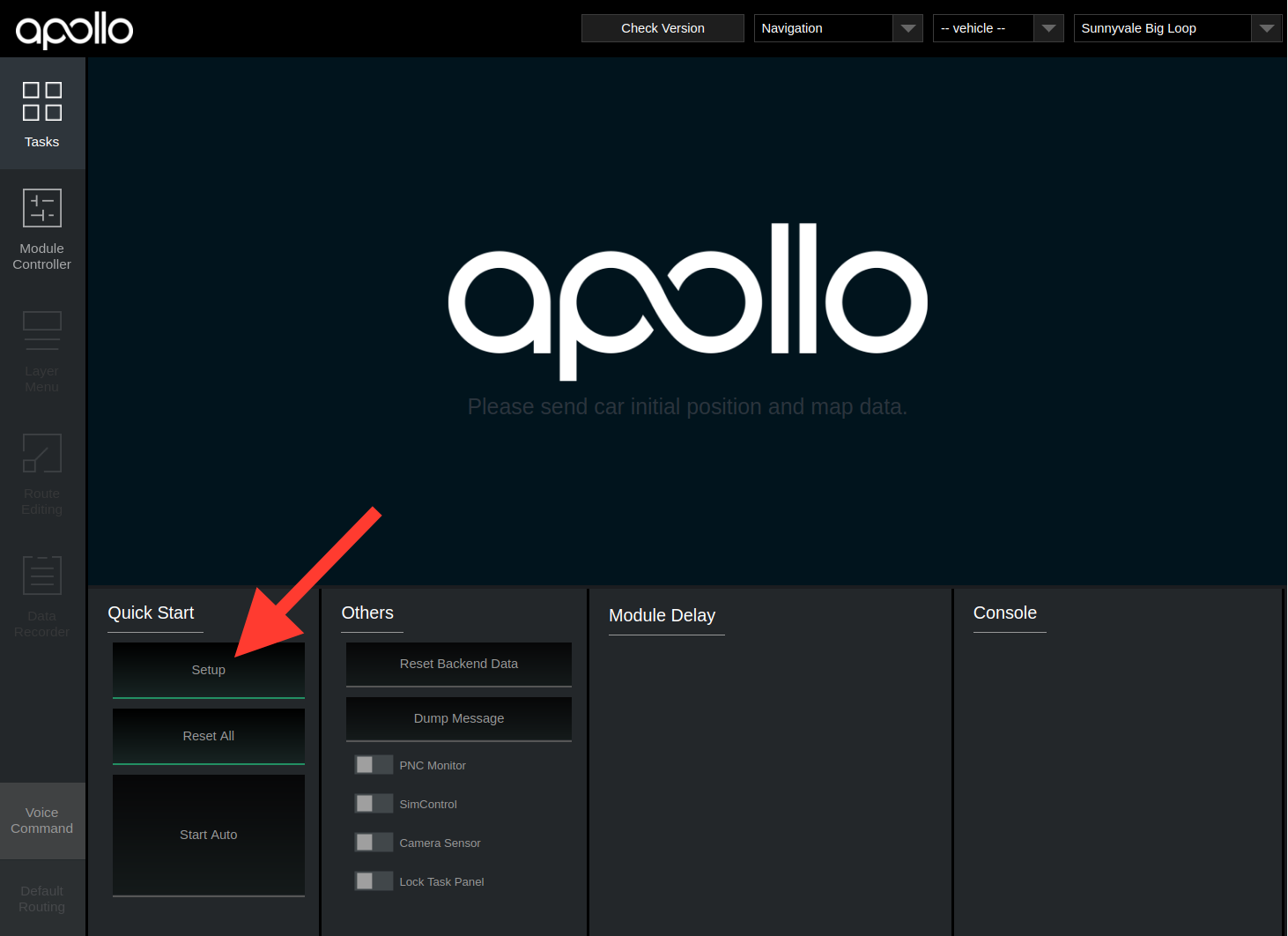
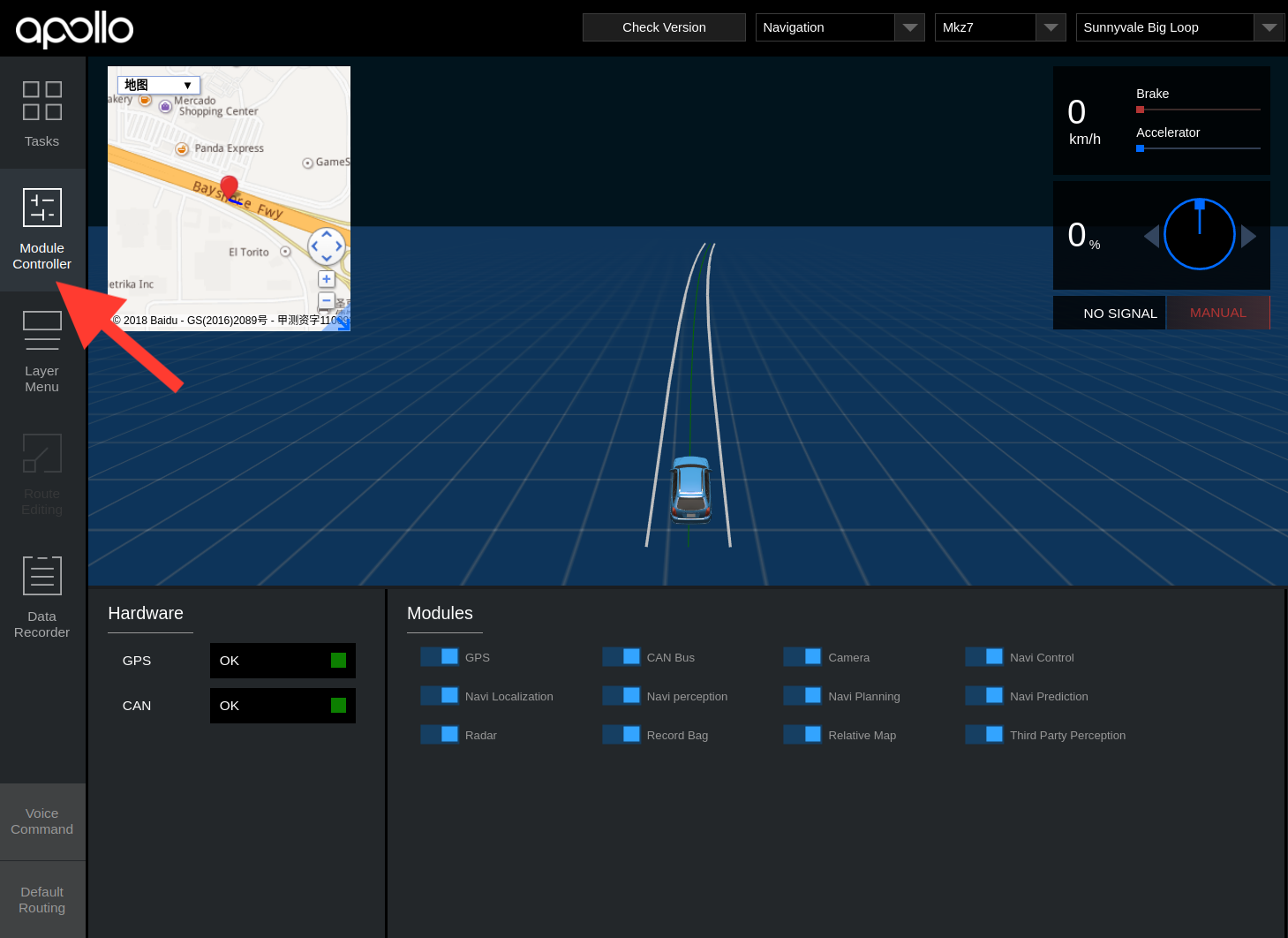
进入Module Controller 面板,检查是否所有的模块和硬件已经准备好(在离线环境中,某些硬件模块如GPS、CANBus、Velodyne、Camera和Radar不会显示)(为了获得良好的GPS信号,可能需要车辆运行一段距离。)
在
Default Routing中选择期望的路线。在
Tasks面板中,点击Start Auto。(将要进入自动驾驶模式时需要十分小心谨慎)。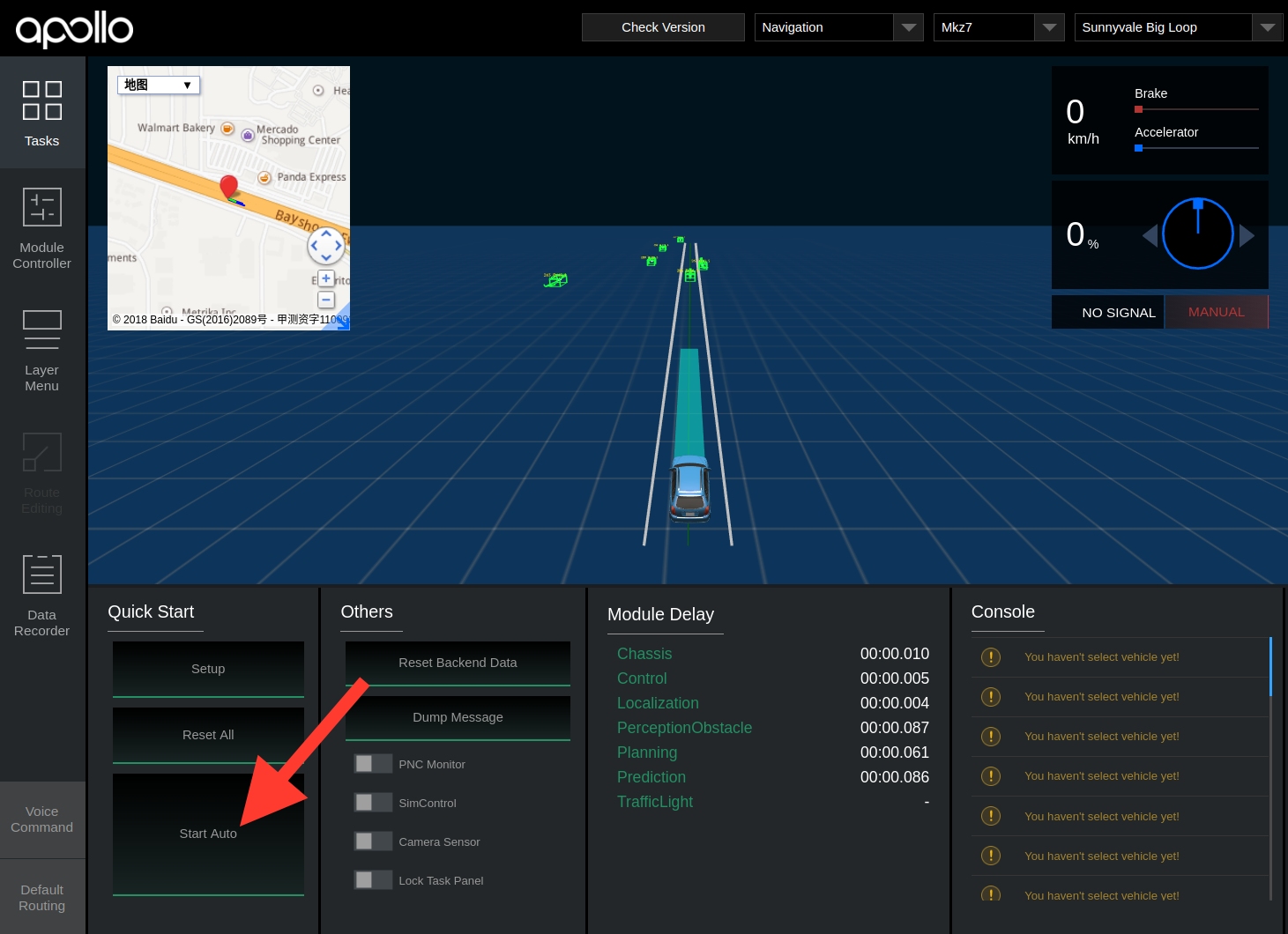
自动驾驶测试结束后,在
Tasks面板中点击Reset All,关闭所有窗口,关闭主机。移除磁盘驱动器。