
如何在本地运行基于NDT点云匹配的定位模块¶
本文档提供了如何在本地基于NDT点云匹配的定位模块的方法。
1. 事先准备¶
从GitHub网站下载Apollo master分支源代码
按照教程设置Docker环境并搭建Apollo工程
从Apollo数据平台下载定位数据(仅限美国地区)
此定位数据为实验性质的demo数据,用于验证定位模块的可用性。数据主要包含定位地图(ndt_map/), 车辆参数(params/), 传感器数据(records/)。具体属性如下: 时长:5分钟 里程:3km 场景:Sunnyvale 城市道路 天气:晴天
2. 配置定位模块¶
为了使定位模块正确运行,需要对地图路径和传感器外参进行配置。假设下载的定位数据的所在路径为DATA_PATH。
在进行以下步骤前,首先确定你在docker容器中。
2.1 配置传感器外参¶
将定位数据中的传感器外参拷贝至指定文件夹下, 目前NDT定位模块与MSF定位模块使用相同外参路径。
cp DATA_PATH/params/ant_imu_leverarm.yaml /apollo/modules/localization/msf/params/gnss_params/
cp DATA_PATH/params/velodyne64_novatel_extrinsics_example.yaml /apollo/modules/localization/msf/params/velodyne_params/
cp DATA_PATH/params/velodyne64_height.yaml /apollo/modules/localization/msf/params/velodyne_params/
在/apollo/modules/localization/conf/localization.conf中添加传感器外参文件配置,以覆盖默认值。
# The lidar extrinsics file
--lidar_extrinsics_file=/apollo/modules/localization/msf/params/velodyne_params/velodyne64_novatel_extrinsics_example.yaml
各个外参的意义
ant_imu_leverarm.yaml: 杆臂值参数,GNSS天线相对Imu的距离
velodyne64_novatel_extrinsics_example.yaml: Lidar相对Imu的外参
velodyne64_height.yaml: Lidar相对地面的高度
2.2 配置地图路径¶
在/apollo/modules/localization/conf/localization.conf中添加关于地图路径的配置
# Redefine the map_dir in global_flagfile.txt
--map_dir=DATA_PATH
这将会覆盖global_flagfile.txt中的默认值。
2.3 修改Topic名称¶
由于目前Apollo支持velodyne 64线,128线lidar, 因此为区分不同设备数据,采用不同的topic名称。因此,在启动之前需要设置正确的lidar topic名称。在/apollo/modules/localization/conf/localization.conf中添加lidar topic名称,以覆盖默认值。
# The pointcloud topic name.
--lidar_topic=/apollo/sensor/velodyne64/compensator/PointCloud2
(可选)另外,对于定位可视化工具的使用,同样需要配置相应的topic名称。修改文件/apollo/modules/localization/dag/dag_streaming_msf_visualizer.dag 中的channel值为:
channel: /apollo/sensor/velodyne64/compensator/PointCloud2
3. 运行NDT定位模块¶
./scripts/ndt_localization.sh
定位程序将在后台运行,可以通过以下命令进行查看。
ps -e | grep ndt_localization
在/apollo/data/log目录下,可以看到定位模块输出的相关文件。
localization.INFO : INFO级别的log信息
localization.WARNING : WARNING级别的log信息
localization.ERROR : ERROR级别的log信息
localization.out : 标准输出重定向文件
localizaiton.flags : 启动localization模块使用的配置
4. 播放演示record¶
cd DATA_PATH/record
cyber_record play -f *.record
另外打开一个终端,进入docker环境,执行
cyber_monitor
终端会显示出topic列表,可以看到定位topic /apollo/localization/pose 有输出。
5. 记录与可视化定位结果(可选)¶
记录定位结果¶
python ./scripts/record_bag.py
该脚本会在后台运行录包程序,并将存放路径输出到终端上。
可视化定位结果¶
NDT定位模块使用与MSF定位模块相同的可视化工具。
运行可视化工具
./scripts/localization_online_visualizer.sh
该可视化工具首先根据MSF定位地图生成用于可视化的缓存文件,存放在/apollo/data/map_visual目录下。
然后接收以下topic并进行可视化绘制。
/apollo/sensor/velodyne64/compensator/PointCloud2
/apollo/localization/pose
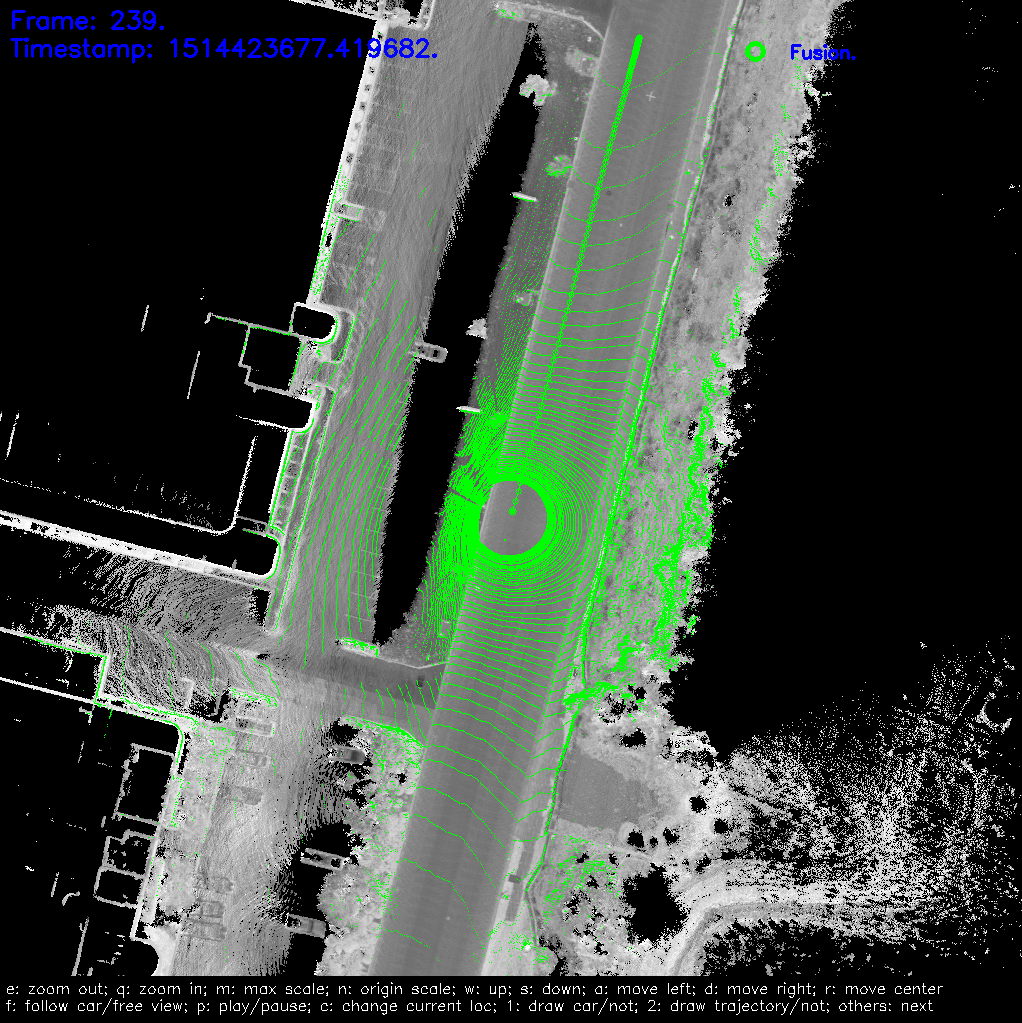
可视化效果如下
如果发现可视化工具运行时卡顿,可使用如下命令重新编译可视化工具
cd /apollo
bazel build -c opt //modules/localization/msf/local_tool/local_visualization/online_visual:online_local_visualizer
编译选项-c opt优化程序性能,从而使可视化工具可以实时运行。
6. 结束运行定位模块¶
./scripts/ndt_localization.sh stop
如果之前有运行步骤5的录包脚本,还需执行
python ./scripts/record_bag.py --stop
7. 验证定位结果(可选)¶
NDT模块定位结果的验证使用MSF模块的验证工具。
假设步骤5中录取的数据存放路径为OUTPUT_PATH,杆臂值外参的路径为ANT_IMU_PATH。
首先将录制的数据包重命名为以.record为后缀的文件。
运行脚本
./scripts/msf_local_evaluation.sh OUTPUT_PATH ANT_IMU_PATH
该脚本会以RTK定位模式为基准,将多传感器融合模式的定位结果进行对比。
(注意只有在GNSS信号良好,RTK定位模式运行良好的区域,这样的对比才是有意义的。)
获得如下统计结果:
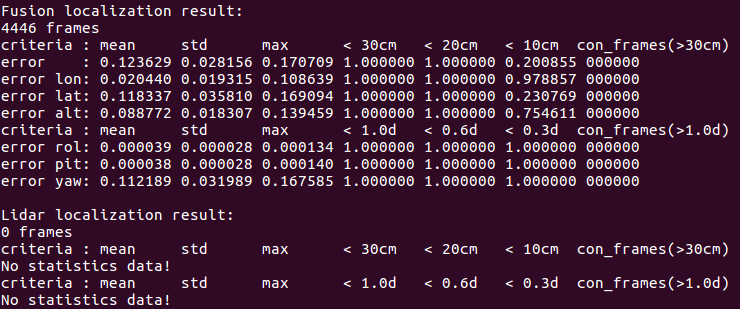
NDT模块的统计结果只有一组,即定位输出/apollo/localization/pose的统计结果。
表格中各项的意义,
error: 平面误差,单位为米
error lon: 车前进方向的误差,单位为米
error lat: 车横向方向的误差,单位为米
error roll: 翻滚角误差,单位为度
error pit: 俯仰角误差,单位为度
error yaw: 偏航角误差,单位为度
mean: 误差的平均值
std: 误差的标准差
max: 误差的最大值
<30cm: 距离误差少于30cm的帧所占的百分比
<1.0d: 角度误差小于1.0d的帧所占的百分比
con_frame(): 满足括号内条件的最大连续帧数